ANALOG AND DIGITAL CONTROL SYSTEM
the concept of analog and digital is no difference, the analog system works there is a process and a period of a long process and is determined by the natural conditions that affect the object of the work, while the digital concept of how it works fast can be considered like the back your hand so the process is very fast out by sensor sensor that of the human senses, so that man can not see the process and how it works from the objects carried in the digital workflow. as illustrated in the Bible is like the Lord Jesus reverses and showed his palms in order to Thomas Thomas believe that He is the Lord Jesus so digital concepts very quickly and well .
In the analog control system, consisting of controllers and devices of analog circuits, linear amplifiers. Control systems are initially analog systems because only analog electronics technology available at the time. In the analog control system, changes in set-point or feedback signals sensed directly, then organize and customize output amplifier (into the actuator).
In the digital control system, the controller uses a digital circuit. In many cases, the digital circuit in question is a computer, usually based on a microprocessor or micro controller (micro-controller). The computer will run the program repeatedly (every iteration called iterations or scan). Program instructing a computer to take the set-point value and the measured data of the sensor and then use these figures to calculate the output controller (which is then sent to the actuator). The program will then start again from the beginning and do the same process. One work cycle for this process takes place in less than 1/1000 sec. Digital systems only take on the state of input at certain intervals in the scanning process and provide the latest output then. If you change the input after the scan process, then this change is not detected until the next scan process. This phenomenon is fundamental that distinguish it from analogue control system that continuously respond to any input changes that occur. But for most of the digital control system, the scan time is very short (<1/1000 sec) compared to the response time to a process that is controlled so that for all practical purposes, feedback controllers seem to occur quickly and immediately.
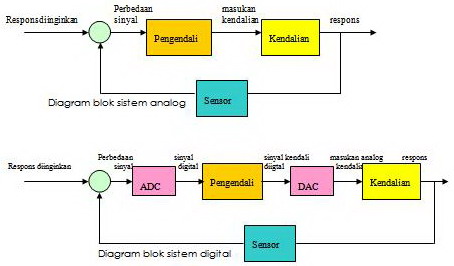
Neighborhoods is "analog world" in this case of natural events that occur usually occurs in a continuous pattern from one state to the next. Thus, most of the control system to control the processes that are analogous. This means that in many cases, digital control system initially had to change the analog input data into digital form before it can be used. The same applies also to the output section, where digital controllers should change the digital output signal into an analog form. Figure shows a block diagram of a closed loop digital control system. Note that there are two additional blocks of the block digital-to-analog converter (D A C) and analog block-to-digital converter (ADC).

Block diagram of digital closed-loop control system.

Sample Application: A pump control which displays liters per minute with an alarm to warn operator of low or stopped flow
Note also that the feedback signal (feedback) from the sensor (after passing ADC) sent directly to the controller (computer), in contrast to analog systems, where the feedback signal is supplied to a comparator to compare it with the set-point value. This means that the digital computer system directly serves as a comparator between the set-point value with the value of the feedback signal.
CLASSIFICATION SYSTEM-CONTROL SYSTEM
The classification of the control system can also be done in other ways, namely through the kinds of applications.
process control
Process control refers to a control system used to monitor a series of industrial processes with the aim that can be implemented with a uniform, so as to produce the right product.
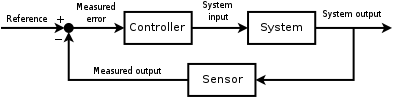
A block diagram of a negative feedback control system. Illustrates the concept of using a feedback loop to control the behavior of a system by comparing its output to a desired value, and applying the difference as an error signal to dynamically change the output so it is closer to the desired output .
X . I
Basic Concepts of Digital Control Systems
In the digital control system, as the (controller) used a computer, microprocessor, micro controller or other logic circuits to process the dynamics of the system. In terms of form signals that work within the system, can we distinguish that on an analog system, the input signal, the signal is processed by the controller and the output signal is in the form of analog signals. While the digital system, the input signal is also generally in the form of analog signals, while signals that are processed by the controller is a digital signal, and the output signal is also generally in the form of analog signals.
Of the difference signal that work on an analog system and a digital system, the digital system need components that function to perform the conversion of the signal, a converter is known as the ADC (Analog to Digital Converter) and D A C (Digital to Analog Converter). The difference between analog systems and digital systems are shown in the following.
Differences Analog And Digital Control Systems
The digital signal obtained through ADC that serves to make the process of sampling (sampling) of the analog signal to produce a discrete signal, then each discrete signals do quantization and so is converted to a digital signal.
Generally, a control (plant) works with analog signals, therefore the digital signal as the output of the controller should be converted back to an analog signal through the D A C. In mathematical operations, each functional block at the top is necessary to find mathematical models. In an analog system the Laplace transforms are used, whereas in digital system used is the transformation of Z. In this book only the transformation of Z which will be given.
Completion of the problems in the field of control would involve such things as:
Selection of a sensor to measure the feedback signal.
Selection of the actuator to move controling .
Developed a mathematical model of control , sensors and actuators
Designing controllers based on the model in point 3 and the criteria of the system.
To evaluate the design through analysis, simulation and test hardware.
Conducting the process of iteration to point 1 s / d 5 to obtain the desired system response.
The above process can be illustrated in the following figure

sistem fisik = Physical of system
model matematik sistem = mathematic model of system
solusi matematika = Mathematical solution
X . II
Analogy Control System

cairan , operator , indikator , klep = fluids, operator, indicators, valve
Eye operator detect any movement of the water level through the scale that has been marked beforehand. eye said as sensor operators.
The signals from the eye (sensor) to the brain, which will determine their deviation. The brain can be regarded as Controller (Controller).
Muscle Arm (Arm of the input valve) and hand (actuators, actuator) rotating valve, called the Device Controller (Controlled Device).
Been directed to maintain the condition of the water in the tank through a valve input to be at the level between 1 and 2. Level the surface of the water in these conditions is referred to as Controlled Conditions (Controlled Condition).
Controlled conditions or the Regional Control can be achieved by controlling the flow of water through the pipe valve input. The current flow of water (flow rate) is known as Variable Manipulation (Manipulated Variable), and a valve input is referred to as Control Devices (Controlled Device).
Water is referred to as Agent Control (Control Agent).
Controlling the flow of water into the tank, the water level will change. Changes in the water level in the tank known as Variable Control (Controlled Variable).
While the water in the tank known as Controlled Media (Controlled Medium).
The water level is maintained cultivated that can be seen on a visual indicator called as like as Set point (Set Point or Set Value).
The water level is maintained at the point between the 1 and 2 are seen on visual indicators and control parameters are still allowed to be slightly above the bottom of the tank and do not overflow. Values in this area is referred to as a desired value (Desired Value).
It is assumed that the level of treated strictly in order to be at a point between 1 and 2. The water level stands at steady state (Steady State), known as Value Control (Control Value) or Real Value (Actual Value).
But in reality the level will be between 1 and 2, but still works well. The difference between the Set point and referred to as the Real Value Deviation (Deviation) or error.
X . III
Grouping control system based on application
I. Process Control
Control refers to the process control system that oversees some industrial processes so that a uniform and correct output can be maintained. Process control can do this by monitoring and adjusting the control parameters (such as temperature and flow rate) to ensure product output remains as it should be. Examples of process control is closed loop system that maintains a predetermined temperature of the electric oven .

In this case, the actuator is a heating element, controlled variable is the temperature, and the sensor is a thermo couple (a device that converts temperature into voltage). The controller controls the power to the heating element such that maintaining the temperature (as reported by a thermo couple) at the value set by reference.
Process control are classified as:
continuous process
batch process
Continuous processes in the flow of materials or products that continually, while the batch process has a beginning and the end point (which is usually done repeatedly).
II . The sequential control system
Sequentially controlled system [sequentially controlled system] control process that is defined as a set of functions that must be implemented in other words, a series of operations, one by one. Each operation in the row implemented, either for a given period, in this case called driven-time [time-driven], or until the task is complete (as indicated by, for example, a switch divider [limit switch]), in this case called event-driven [event-driven]. Row
driven-time is an open loop since no feedback, while event-driven tasks that are close loop for feedback signal is required to establish when the task is completed.

Examples of the system being controlled sequence is fully automatic washing machine.
The first step in the washing cycle is filling the washing tube. It is a task-driven event because the water is allowed to enter up to achieve true high-surface. The next two tasks, rinse [wash] and turn-dry [spin-drain], each carried out over a certain period and the steps that are driven time.
III . The motion control
Electro mechanical motion control system is an open loop and closed loop control in which objects undergo displacement. Such systems typically include motors, mechanical parts are moving, and (in many cases) sensors feedback.
Various motion control:
a. Servo-mechanism [servomechanism]
Servo-mechanism [servomechanism] is the term traditionally used to describe electro mechanical control system closed-loop directing a careful displacement of a physical object such as a radar antenna or a robotic arm. Typically, could-be-controlled output position or velocity output (or both). An example of a servo-mechanism is positioning systems for radar antenna, as shown in Figure

b. Numerical control [Numerical Control or NC]
These machines can automatically cut and form-work objects without a human operator. Each engine has a set of axes [axis] and its own parameters that must be controlled; as an example, consider forging machine shown in Fig. object - work [work piece] that is being formed is attached to the table to move. The table can be moved (using electric motors) in three directions: X, Y, and Z. The rate-cutting tools also automatically controlled. To make a piece, the table moving objects passing through the gear-cutting work [cutting
tool] on the speed and depth of cuts that have been set. In this example, four parameters (X, Y, Z, and rpm) continuously and independently controlled by the controller. As an input controller receives a series of numbers which are more fully described how the part should be made. These numbers include measures of physical and details such as rate cuts and the pace of bribes [feed].

c. Robo

Robo ( Ringing on Boat ) industry is a classic example of a position control system. In most cases, the robot has a single arm with joints of the shoulder, elbow, and wrist, as well as a kind of hand called the end effector .

six-axis industrial robo ( ringing on boat ) are controlled independently-known as having six degrees of freedom [degree of freedom] .



Timer digital

Timer mechanic


X . IIII
Some of the benefits of applying control analog and digital is as follows:
1. Increasing flexibility
The greatest benefit that can be gained from the application of mechatronics is to increase flexibility of the engine by adding new functions that the majority of the contributions of micro-processor. For example, the industrial robot arm can perform this type of work by changing the kinds of software programs in micro-processor as well as a human arm. It yuang be the main factor allowing for the production of diverse type is the amount a little.
2. Increasing Reliability
In conventional machines (manual) appears the problems caused by different types of friction in the mechanism used such as obsolescence, problems touch, vibration and noise. On the use of the machine and the operator is required means that polynomial timbulanya to prevent these problems. By applying the semiconductor switch for example, the problems due to the touch can be minimized thus increasing reliability. In addition, by using machine components as motion control, precision and speed have reached saturation lines that are difficult to be appointed again. By applying digital control and electronics technology, the level of precision machinery and machine motion speed can be raised higher to a certain extent. This limit, for example is a machine rigidity that prevents higher speed because of the advent of vibration. This gave rise to the new challenge is to create a system that has a machine that prevents the engine rigditas higher speeds due to the advent of vibration. This gave rise to a new tatangan namely to create a system of machines that have higher rigidity. Mechatronic structure can be divided into 2 pieces of the world that is the world of mechanics and electronics world. In the world there are mechanisms engine mechanics as a controlled object. In the world of electronics, there are several mechatronic elements, namely: sensors, controllers, actuators pengerak circuit and an energy source.
The mechanism of the machine. It is the object of control can be robor arm, automotive drive mechanism, generators and so forth. Sensor. It is tasked with monitoring the state of the elements of the object are controlled. This sensor is equipped with signal conditioning circuit function to process electrical signals into signals that contain information that can be utilized. Controller. This is the element that takes the decision whether state control of the motorcycle in accordance with the desired reference value, and then process the command infromasi to assign a value to merefisi state of the object of control. Circuit. These are elements that function to receive command signals from the controller and converts it into energy that can move the actuator to execute the command from the controller. These elements are in addition to receiving information from konroler also receive high-energy power supply. Aktutor. This is the element that serves to convert energy from mechanical energy to electrical energy. This actuator concrete forms for example: electric motors, hydraulic tube, tube penematik. And so forth. Energy sources. These are elements that distribute electrical energy to all the elements that membutuhkannnya. One concrete form of energy source is a battery for the system on the move, or AC-DC adapter to the system stasionari (still in place). Mechatronics structure described herein in terms of control theory called feedback system (closed loop). This feedback system resemble living beings, where the activities are always revising its actions based on the feedback information sent by Indar to the brain. Thus mechatronics is to realize the mechanical system is capable of doing the job as well as a manusi who have perfect conditions. Formal boundaries between the various disciplines of engineering (enggineering) maker now increasingly kabaru line with technological developments IC (Integrated Circuit = integrated electronic circuits) and computer. This is especially noticeable in the fields of mechanics and electronics are a growing number of products which is an integration of the two fields, so that it develops a field called mechatronics, which is an expansion of the scope of the field of electromechanical ..
Some of the definitions are taken from a variety of sources including: "Integration of microprocessor control systems, electrical systems and mechanical systems" (Bolton, Mechantronics). The fo synergistic combination of precision mechanical engineering, electronic control and systems thinking in the design of products and manufacturing processes "(Journal of Mechantronics). "The synergistic use of precision engineering, control and process (ME Magazine). "The interdisciplinary field of engineering dealing with the design of products Whose function relies on the synergistic in
3. Applications Applications Mechantronics
Currently the control of the mechanical system is almost entirely carried out using an electronic control system and most of them use a computer. An example is a car engine. Formerly the flare that occurred in the cylinder is controlled entirely mechanically. Many regulation fuel and air directly from the pedals via cable media by comparison that has been previously tuning . Valves open and closed mechanically regulated using camshaft depending on the position of the piston.
Currently a lot of sensors involved in the combustion system of the car that is in between the speed sensor and crankshaft position, air temperature sensor and fuel, and the sensor on the gas pedal. All the information from these sensors is processed by the control systems in the form of a computer called the Engine Control Unit to be used to set the time and the amount of valve opening and the fuel-air ratio can be adjusted to the rider or machine. In the car there are also many other systems that are currently implementing mechantronic systems, namely automatic transmission systems, active suspension system.
Tidak ada komentar:
Posting Komentar