

Alat Elektronik dan Ketergantungan pada Teknologi
Penggunaan robot untuk keperluan militer di berbagi negara maju
seperti Amerika Serikat, memang bukan sekedar wacana semata, namun hal
ini telah mereka realisasikan dalam membuat sebuah alat perang yang
tidak mungkin menolak perintah dan tidak ragu dalam mengerjakan misi
tentunya menjadi impian para petinggi militer di negara manapun juga.
Jika tadi kehadiran robot – robot militer dilihat dari sudut pandang yang menguntungkan, tetap saja robot – robot militer tersebut tetap memiliki tujuan yang sama dengan tentara manusia yaitu sebagai alat yang digunakan untuk menghancurkan musuh. Tetap saja sasaran – sasaran yang dihancurkan sama, jika tidak perangkat militer, bangunan pasti manusia. Hal – hal inilah yang mungkin membuat beberapa peneliti / pengembang tidak setuju penggunaan robot dalam militer.
Sekali lagi ada banyak hal penting yang perlu diperhatikan dan diwaspadai dengan semakin maraknya penggunaan robot di bidang militer. Karena biar bagaimanapun, robot merupakan sebuah benda yang diberi kecerdasan buatan, yang menjalankan tugas sesuai dengan program yang telah diinstruksikan kepadanya .
Jika tadi kehadiran robot – robot militer dilihat dari sudut pandang yang menguntungkan, tetap saja robot – robot militer tersebut tetap memiliki tujuan yang sama dengan tentara manusia yaitu sebagai alat yang digunakan untuk menghancurkan musuh. Tetap saja sasaran – sasaran yang dihancurkan sama, jika tidak perangkat militer, bangunan pasti manusia. Hal – hal inilah yang mungkin membuat beberapa peneliti / pengembang tidak setuju penggunaan robot dalam militer.
Sekali lagi ada banyak hal penting yang perlu diperhatikan dan diwaspadai dengan semakin maraknya penggunaan robot di bidang militer. Karena biar bagaimanapun, robot merupakan sebuah benda yang diberi kecerdasan buatan, yang menjalankan tugas sesuai dengan program yang telah diinstruksikan kepadanya .
Perkembangan
teknologi dan modernisasi peralatan elektronik telah menyebabkan
terjadinya perubahan yang mendasar di dalam aktivitas manusia
sehari-hari, di mana manusia selalu menginginkan segala sesuatunya serba
otomatis, praktis dan fleksibel. Era globalisasi saat ini waktu dan
tenaga sangat berarti sehingga pemakaiannya begitu diperhatikan agar
seefektif dan seefisien mungkin. Manusia dituntut untuk bekerja lebih
cepat dan efisien dalam mencapai tujuan yang diinginkan. Dengan
perkembangan teknologi yang kian pesat, unjuk kerja peralatan elektronik
pun semakin meningkat dan mendorong manusia mencari inovasi baru dalam
penyediaan fasilitas dan sarana untuk mencapai tujuan tersebut. Salah
satunya adalah Robot yang merupakan hasil inovasi manusia yang dapat
meringankan dan membantu manusia dalam berbagai bidang pekerjaan.....
Robot adalah suatu mesin yang dibangun dari Mekanik-Elektronik (mekatronik) yang terprogram/terkontrol secara otomasi sehingga dapat menggantikan fungsi manusia dalam membantu pekerjaannya pada berbagai bidang dan dapat meminimalisasi tenaga manusia serta meningkatkan unjuk kerja dalam waktu yang singkat, dengan biaya yang minimum dan tingkat keamanan yang tinggi....
Robot memiliki tingkat keamanan yang tinggi yang berarti ia dapat digunakan untuk mengendalikan peralatan-peralatan yang berada di luar jangkauan manusia, yang mempunyai resiko tinggi baginya. Kegunaan robot menggantikan fungsi manusia pada daerah-daerah yang membahayakan keselamatan manusia, pada kegiatan-kegiatan rutinitas lainnya yang perlu ketelitian tinggi. Manusia tidak akan berinteraksi langsung dengan benda kerjanya. Ia hanya mengendalikan alat-alat pengontrol untuk menggerakkan robot dari jarak jauh, sehingga robot dapat melakukan gerakan-gerakan atau bekerja sebagaimana yang diinginkan manusia sebagai pengontrol gerakannya.....
Robot adalah suatu mesin yang dibangun dari Mekanik-Elektronik (mekatronik) yang terprogram/terkontrol secara otomasi sehingga dapat menggantikan fungsi manusia dalam membantu pekerjaannya pada berbagai bidang dan dapat meminimalisasi tenaga manusia serta meningkatkan unjuk kerja dalam waktu yang singkat, dengan biaya yang minimum dan tingkat keamanan yang tinggi....
Robot memiliki tingkat keamanan yang tinggi yang berarti ia dapat digunakan untuk mengendalikan peralatan-peralatan yang berada di luar jangkauan manusia, yang mempunyai resiko tinggi baginya. Kegunaan robot menggantikan fungsi manusia pada daerah-daerah yang membahayakan keselamatan manusia, pada kegiatan-kegiatan rutinitas lainnya yang perlu ketelitian tinggi. Manusia tidak akan berinteraksi langsung dengan benda kerjanya. Ia hanya mengendalikan alat-alat pengontrol untuk menggerakkan robot dari jarak jauh, sehingga robot dapat melakukan gerakan-gerakan atau bekerja sebagaimana yang diinginkan manusia sebagai pengontrol gerakannya.....
Ada hubungannya dengan wacana di atas dengan sebuah film animasi : Film tersebut berjudul Wall-E yang berceritakan tentang sebuah robot yang bisa dikatakan lama sekali tidak terurus (jelek) yang tinggal di bumi bersama teman kecoaknya. Kerjaannya hanya mengumpulkan banyak sampah dan disusun dengan rapih. Ketika ia sedang bermain, ia menemukan sebatang pohon kecil yang ada daunnya tumbuh diantara sampah-sampah yang ia kumpulkan.....
Kemudian munculah sebuah robot putih yang bisa dikatakan lebih canggih datang ke bumi untuk menemukan sebatang pohon kecil yang ditemukan oleh robot bernama Wall-E tersebut. Pada saat robot yang bernama EVE tersebut menemukan sebatang pohon, ia kembali lagi ke tempat asalnya dimana disana banyak sekali manusia yang hidup didalam kapal yang sangat besar.....
Kehidupan dikapal pesiar terbesar banyak sekali manusia yang hidup disana, tetapi sangat disayangkan mereka hidup ketergantungan dengan robot. Maka dari itu manusia disana semuanya berbadan besar. Dikarenakan mereka setiap hari duduk diatas kursi yang bisa bergerak kesegalah arah dengan mengikuti jalurnya masing-masing. Banyak robot-robot yang membantu manusia jika manusia tersebut mengalami kesusahan. jadi manusia tersebut hanya bisa duduk-duduk saja dan menikmati pemandangan yang telah tersedia disana. Dan robot-robotlah yang bertugas sebagai (bisa dikatakan sebagai pembantu) untuk mengurusi semua permintaan manusia. Seperti membersihkan kotoran yang jatuh kelantai, dll....
Tetapi karena sering bergantung kepada robot-robot, semua manusia menjadi malas untuk beraktivitas kembali. Jadi robot yang bernama eve tersebut membawa sebatang pohon kecil untuk membuat manusia bisa kembali ke rumah asal mereka yaitu bumi tercinta. Tetapi ada salah satu robot yang tidak setuju atau tidak ingin para manusia tersebut kembali lagi ke bumi. Pada akhirnya para robot lain membantu seorang kapten yang sebagai pemimpin didalam kapal pesiar yang besar itu untuk menempatkan sebatang pohon itu didalam sebuah tabung besar yang pada akhrinya manusia bisa kembali kerumah asal mereka lagi yaitu bumi tercinta. Dan pada akhirnya manusia dan para robot-robot termasuk wall-e dan eve hidup bahagia bersama dibumi....
Didalam cerita ini banyak manfaat yang bisa kita ambil. Bahwa sebenarnya walaupun kita sebagai manusia mempunyai banyak aktivitas yang terlalu padat, jangan terlalu ketergantungan kepada robot-robot yang telah diciptakan oleh manusia itu sendiri untuk membantu kita dalam pekerjaan yang cukup dibilang sulit. Karena para robot-robot tersebut mempunyai perasaan juga sama seperti layaknya manusia. Walaupun zaman semakin canggih dan semakin modern, para robot pun sudah mulai dirancang atau dibuat oleh manusia untuk membantu para manusia. Dan juga para manusia tidak boleh sombong dan tidak boleh menyepelekan sebuah robot. Bisa saja manusia merancang atau membuat robot yang lebih pintar dibandingkan manusia itu sendiri. dibawah ini tentang rumah Robot :
Rumah robot ini dapat merespon lingkungan disekitarnya baik
cuaca panas ataupun dingin, dan itu dapat memberikan efek suasana yang
terjadi pada rumah robot dengan tindakan rotasi atau berputar yang ada
pada desain rumah robot. Hunian robot yang unik ini mengusung tipologi
baru yaitu, menjadi satu berdasarkan gerakan dan interaksi yang terjadi
pada rumah robot.

Prinsip sederhana dari line tracer ini
adalah pendeteksian pantulan jalur gelap dan terang yang dideteksi
melalui LDR. LDR merupakan komponen resistor yang nilai tahanannya
berubah-ubah sesuai dengan intensitas cahaya yang masuk.



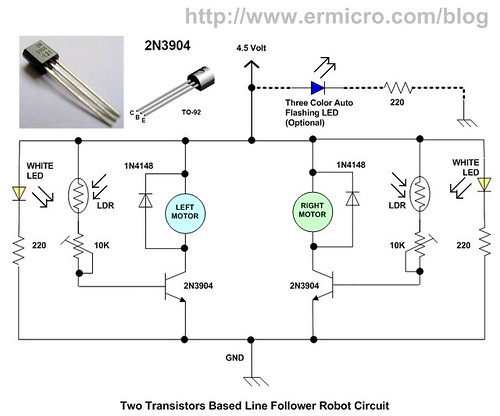

Terdapat dua sensor yang ditempatkan disebelah kanan dan kiri dari
line/garis jalur yg akan dilalui , dengan menggunakan prinsip pemantulan
sinar LED yang ditangkap LDR berbeda ketika melalui jalur berwarna
terang atau gelap. Jika sensor kiri mendapatkan gelap, maka akan
menyebabkan roda sebelah kiri lebih lambat dari roda kanan sehingga akan
berbelok ke kiri seperti rangkaiannya berikut ini:
LDR melakukan drive ke basis transistor berdasarkan intensitas cahaya yg didapat dan selanjutnya mengatur putaran motor
Motor yang digunakan haruslah motor yang mempunyai gear, karena motor
tamiya/mobil-mobilan tanpa gear memiliki torsi/daya tarik yg lemah.























{kind=link}