“Counter Naturalwise”
Sistem stater
PRINSIP DASAR
1. Elektromagnetik
Sebagaimana dijelaskan dalam dasar-dasar kelistrikan, bahwa bila sebuah
konduktor dialiri arus listrik, maka disekitarnya timbul medan magnit.
Kaedah sekrup ulir kanan
Adapun arah medan magnet dihasilkan tergantung dari arah arus listrik yangmengalir. dijelaskan bahwa dengan mengalirnya arus listrik yang sesuai dengan
arah tanda panah, maka akan dapat menimbulkan medan magnet yang arahnya
sama dengan arah putaran jarum jam (kekanan).
Dan selanjutnya gejala seperti ini disebut dengan kaedah sekrup ulir kanan
atau kaedah ibu jari kanan Fleming.
Apabila konduktor dipegang dengan tangan kanan maka ibu jari akan menunjukkan
arah arus listrik yang mengalir, sedangkan garis-garis gaya magnet sesuai dengan
keempat jari lainnya. Selanjutnya arah arus yang menjauhi dan mendekati
digambarkan dalam simbol kelistrikan sebagai lingkaran dan didalamnya ada tanda
dan
Gaya Elektromagnetik
apabila sebuah konduktor diletakkan diantara dua kutub
(N – S) dan konduktor tersebut dialiri arus listrik, maka disekeliling konduktor akan
terbentuk garis gaya magnet yang saling berpotongan dengan garis gaya magnet
pada kutub N dan S dan menyebabkan garis gaya magnet bertambah dibagian
bawah penghantar dan bertakurang di bagian atas penghantar. Akibatnya
penghantar akan memperoleh gaya yang cenderung mendorong ke atas. Gerakan
penghantar tersebut dapat ditentukan dengan menggunakan kaedah tangan kiri
“Fleming” .
Perbaikan Sistem Starter
Kekuatan gaya elektromagnetik (F) sebanding dengan kerapatan (densitas)
magnetic flux (B), arus (I) yang mengalir pada penghantar (konduktor) dan
panjang penghantar (L) yang dinyatakan :
F=BxIxL B = Densitas magnetic flux
I = Besarnya arus yang mengalir pada
penghantar
L = Panjang Penghantar
Kekuatan gaya elektromagnetik
Dengan kata lain, gaya elektromagnetik akan lebih besar dan medan magnetnya
makin kuat, bila arus listrik yang mengalir pada penghantar besar.
Sebuah konduktor/kawat penghantar yang berbentuk “U” bila dialiri arus listrik maka
akan menghasilkan medan magnet yang arahnya berbeda. Untuk konduktor yang
arah arusnya menjauhi kita arah medan magnet yang ditimbulkan akan searah
jarum jam. Sedangkan sebaliknya untuk konduktor yang arah arusnya mendekati
kita · , akan menghasilkan arah medan magnet berlawanan jarum jam.
Kemudian konduktor tersebut diletakkan diantara kutub magnet utara dan selatan,
seperti ditunjukkan maka timbul kombinasi garis-garis gaya magnet.
Akibatnya didaerah “kutub N” akan timbul tenaga ke atas dan di “kutub S” akan
timbul tenaga ke bawah sehingga menimbulkan momen puntir.
Gerakan Konduktor
B. FUNGSI SISTEM STARTER
Sistem starter berfungsi untuk memberikan gerakan awal pada engine atau
memutarkan poros engkol sehingga engine dapat hidup.
Sistem starter dapat dibedakan atas 2 macam :
1. Sistem starter mekanik
2. Sistem starter dengan motor listrik
a. Sistem starter mekanik
Sistem ini menggunakan engkol pemutar untuk pemutaran poros engkol. Ujung
engkol pemutar yang mempunyai nok menggerakkan poros engkol lewat pully
yang ujungnya berlubang serong. Orang yang memutarkan engkol berada pada
bagian depan kendaraan. System starter jenis ini sudah jarang digunakan lagi.
b. Sistem starter dengan motor listrik
Sistem starter ini menggunakan motor listrik untuk menggerakkan poros engkol.
Motor listrik dipasang pada bagian belakang blok silinder. Dewasa ini system
starter jenis motor listrik yang digunakan pada mobil-mobil dan truk-truk kecil ada
2 tipe yaitu :
1) Motor starter tipe biasa
2) Motor starter tipe reduksi
Mobil yang dirancang untuk di pergunakan pada daerah dingin
mempergunakan motor starter tipe reduksi, karena dapat menghasilkan
momen yang lebih besar untuk menstarter engine pada cuaca dingin.
Karena kemampuannya membangkitkan momen jauh lebih besar dari pada
tipe biasa pada ukuran dan berat yang sama.
Pada saat sekarang ini mobil-mobil cenderung mempergunakan tipe reduksi
meskipun dioperasikan di daerah panas.
C. KONSTRUKSI DAN CARA KERJA MOTOR STARTER
1. KONSTRUKSI TIPE BIASA
Motor starter tipe ini, terdiri dari sebuah magnetic switch (solenoid), motor
elektrik, drive lever, pinion gear, starter clutch (kopling) dan lain-lain Pinion gear ditempatkan satu poros dengan armature dan berputar dengan
kecepatan yang sama.
Drive lever yang dihubungkan dengan plunger magnetic switch mendorong
plunger berkaitan dengan ring gear.
Konstruksi tipe biasa
a. Magnetic switch (solenoid)
Magnetic switch terdiri dari hold-in coil dan pull-in coil. Ini dioperasikan oleh
gaya magnet yang dibangkitkan didalam kumparan dan mempunyai dua
fungsi sebagai berikut:
· Mendorong pinion gear sehingga berkaitan dengan ring gear
· Bekerja sebagai main switch atau relay yang memungkinkan arus yang
besar dari batere mengalir ke motor starter.
. Magnetic Switch
b. Yoke dan Pole Core
Yoke dan pole core
Yoke dibuat dari logam yang berbentuk silinder dan berfungsi sebagai tempat
pole core yang diikatkan dengan sekrup. Pole core berfungsi sebagai
penopang field coil dan memperkuat medan magnet yang ditimbulkan oleh
field coil saat dialiri listrik.
c. Field Coil
Pada starter biasanya digunakan empat field coil yang berarti mempunyai
empat core.
Gambar 9. Field Coil
Perbaikan Sistem Starter Fiel coil dibuat dari lempengan tembaga, dengan maksud memungkinkan
mengalirnya arus listrik yang cukup besar. Field coil berfungsi untuk
membangkitkan medan magnet.
c. Armature
Armature and shaft
Armature terdiri dari sebatang besi yang berbentuk silindris dan diberi slot-
slot, poros, komutator serta kumparan armature. Berfungsi untuk merubah
energi listrik menjadi energi mekanik dalam bentuk gerak putar.
Perbaikan Sistem Starter d. Brush atau sikat-sikat
Gambar 11. Brush terangkai
Brush terbuat dari tembaga lunak, dan carbon yang berfungsi untuk
meneruskan arus listrik dari field coil ke armature coil langsung ke massa
melalui komutator. Umumnya starter mempunyai empat buah brush, yang
dikelompokkan menjadi dua :
1) Dua buah disebut dengan sikat positif
2) Dua buah disebut dengan sikat negatif
Penting !
Pegas sikat yang melemah dan sikat yang telah aus akan menyebabkan
persinggungan kurang baik dengan segmen comutator. Akibatnya timbul
tahanan kelistrikan yang terlalu tinggi pada titik persinggungan dan akan
mengurangi supplay arus ke motor dan menurunkan momen yang
dibangkitkan.
e. Armature Brake
Armature Brake terangkai
Armature brake berfungsi sebagai pengereman putaran armature setelah
lepas dari perkaitan dengan roda penerus.
f. Drive Lever
Drive lever
Drive lever berfungsi untuk mendorong pinion gear ke arah posisi berkaitan
dengan roda penerus dan melepas perkaitan pinion gear dari perkaitan roda
penerus pada saat engine sudah hidup.
g. Starter Clutch and Pinion gear
Starter clutch and pinion gear
Starter clutch berfungsi untuk memindahkan momen puntir dari armature
shaft kepada roda penerus (ring gear), sehingga dapat berputar. Starter
clutch juga berfungsi sebagai pengaman dari armature coil jika roda penerus
cenderung memutarkan pinion gear.
2. CARA KERJA MOTOR STARTER TIPE BIASA
a. Kunci kontak pada posisi START
Pada
saat
starter
switch
START
Jika
Ignition
Terminal
Hold on
Ground
starter switch diputar
ke posisi Start, maka
Batere
Switch
50/St
Pull in
Terminal
C/M
arus dari:
Fiel Coil
Armature
Pada saat ini hold-in dan pull-in coil membentuk gaya magnet dengan arah
yang sama, karena arah arus yang mengalir sama. Akibatnya plunger akan
bergerak ke arah main switch, sehingga drive lever bergerak menggeser
starter clutch ke arah posisi berkaitan dengan ring gear. Karena arus yang
mengalir ke field coil pada saat itu masih relatif kecil maka armature berputar
lambat dan memungkinkan perkaitan pinion dan ring gear menjadi lembut.
Pada saat ini kontak plate/plunger belum menutup main switch.
b. Pada saat pinion berkaitan penuh dengan ring gear
Pada saat pinion berkaitan penuh
Bila pinion gear sudah berkaitan penuh dengan ring gear, kontak plate/
plunger akan mulai menutup main switch. Pada saat ini arus mengalir
sebagai berikut :
Diterminal C/’M ada arus, maka arus dari pull-in coil tidak dapat mengalir,
tetapi kontak plate ditahan oleh kemagnetan hold-in coil saja. Bersamaan
dengan itu arus yang besar akan mengalir dari :
Akibatnya starter dapat menghasilkan momen puntir yang besar yang
digunakan untuk memutarkan ring gear.
Jika mesin sudah hidup, ring gear akan memutarkan atmature meialui
pinion.
Untuk menghindari kerusakan pada starter, maka kopling akan
membebaskan dan melindungi armature dari putaran yang berlebihan.
c. Pada saat switch ke posisi ON
. Saat starter switch pada posisi ON
Sesudah starter switch ke ON, main switch dalam keadaan belum bebas dari
kontak ptate, maka alran arus sebagal berikut :
Karena arus pull-in coil dan hold-in berlawanan maka arah gaya magnet yang
dihasilkan juga berlawanan sehingga keduanya saling menghilangkan gaya
magnetnya, hal ini mengakibatkan kekuatan return spring mengembalikan kontak
plate ke posisi semula. Dengan demikian drive lever menarik starter clutch dan pinion
gear terlepas dari perkaitan dengan ring gear.
3. KONSTRUKSI TIPE REDUKSI
Motor starter tipe reduksi adalah motor starter yang disempurnakan dalam
bentuk yang lebih kecil dan lebih cepat putarannya. Selain itu juga model ini
dapat menghasilkan gaya putar yang lebih kuat, karena memakai idle gear.
Dengan idle gear tersebut, gaya rotasi dari armature diperlambat sampai
sepertiga putaran agar dapat menghasilkan momen puntir yang lebih kuat
pada pinion gear. Motor starter tipe ini menghasilkan momen yang lebih
besar, dengan ukuran dan berat yang sama bila dibandingkan dengan tipe
konvensional.
Konstruksi tipe reduksi
Komponen Motor Stater Tipe Reduksi
a. Motor dan Reduction Gear.
Motor dan reduction gear terdiri dari armature idle gear dan clutch gear
Putaran armature dipindahkan ke drive
pinion melalui idle gear dan clutch gear sehingga putarannya berkurang
sampai seperempat setelah melalui mekanisme clutch.
b. Kopling starter (Starter clutch)
Seperti halnya pada starter tipe biasa, pada starter reduksipun dilengkapi
dengan starter clutch. Untuk motor starter tipe reduksi ini, dipergunakan
starter clutch seperti berikut:
Starter clutch terdiri dari pinion shaft yang perpindahannya jadi satu dengan
pinion, spline tube yang disesuaikan terhadap clutch bagian dalam, clutch
cover untuk menutup clutch outer, clutch roller dan clutch gear. Clutch roller
adalah jenis outer roller, dan cara kerjanya adalah pergerakan dari magnetic
switch menyebabkan plunger magnetic switch menekan clutch pinion shaft,
yang mana putarannya menekan return spring dan bergerak ke arah kiri
(searah tanda panah).
Oleh karena screw spline mendorong terhadap pinion shaft, pinion akan
maju, sambil berputar dan berkaitan dengan ring gear. Yang berfungsi untuk
mencegah kerusakan gigi-gigi dari roda gigi pada peristiwa persentuhan
antara gigi ke gigi karena kegagalan dalam perkaitannya dan untuk menjamin
perkaitan yang wajar antara pinion dan ring gear. Drive spring dilengkapi
dengan pinion. Fungsi drive spring adalah sebagai berikut :
Apabila pinion meluncur ke ring gear, drive spring ditekan oleh pinion shaft
supaya hanya shaft saja yang maju, menyerap gaya plunger dan mencegah
gigi-gigi dari kerusakan.
Dengan pengajuan dari pinion shaft, pinion diputar oleh putaran torque dari
screw spline dan menjamin perkaitan dengan ring gear. Peristiwa bila pinion
seharusnya tidak berkaitan dengan ring gear, shaft sendiri yang akan maju
menutup titik kontak utama magnetic switch. Armature akan berputar,
menyebabkan pinion berputar dan berkaitan dengan ring gear. Untuk
jelasnya dapat dilihat cara kerjanya pada,
Cara Kerja Starter Clutch
, bahwa mekanisme clutch roller adalah jenis
outer roller. Bila starter bekerja, roller-roller akan meluncur ke dalam outer dan
mengunci bagian outer dan inner bersama-sama dan memindahkan momen
puntir (torque) dari outer (clutch gear) ke inner (spline tube).
Saat starter bekerja
Sebaliknya, apabila mesin mulai hidup dan ring gear mulai memutar pinion,
bagian inner yang berhubungan dengan pinion shaft dan screw spline akan
berputar lebih cepat dibanding bagian luar (outer). Kemudian seperti pada
, roller-roller akan menekan pegas-pegas (springs) dan kembali ke
posisi semula.
Akibatnya inner akan bebas dari outer sehingga dapat mencegah armature
berputar berlebihan (over running).
. Saat mesin sudah hidup
c. Sakelar Magnet
Sakelar magnet terdiri dari rumah, tutup solenoid, pull-in coil untuk menarik
plunger dan hold-in coil untuk menahan plunger. Plunger dipakai untuk
mendorong pinion keluar dari main kontak untuk mensuplai arus dari batere
ke motor.
Tapi waktu yang bersamaan plunger menekan pegas
(spring 1). Kontak plate dan plunger merupakan satu kesatuan. Jadi apabila
starter switch pada posisi STAR, plunger tertarik ke dalam dan plunger shaft
mendorong clutch pinion shaft ke luar, akibatnya armature berputar dan
selanjutnya pinion akan berkaitan dengan ring gear secara sempurna.
menunjukkan bahwa pegas (spring 2) dipasang didalam
plunger yang fungsinya sama seperti drive spring seperti uraian didepan.
4. CARA KERJA TIPE REDUKSI
a. Kunci kontak pada posisi “START”
Bila kunci kontak diputar pada posisi start, arus listrik mengalir dari batere
melalui terminal 50 (St) ke hold-in dan pull-in coil. Arus mengalir lewat
pull-in coil, kemudian terus ke field coil dan armature coil melalui terminal
C (M). Pada saat ini motor berputar pada kecepatan rendah dan saat
yang sama pull-in dan hold-in coil menghasilkan gaya magnet dengan
arah yang sama dan menekan plunger ke kiri melawan riturn spring.
Pinion gear kemudian bergeser ke kiri sampai berhubungan dengan ring
gear. Kecepatan motor yang rendah pada tahap ini menyebabkan pinion
gear dan ring gear berhubungan dengan lembut.
b. Pinion dan ring gear berhubungan
Dengan terbentuknya gaya magnet pada magnetic switch menyebabkan
plunger dan alur spiral mendorong pinion gear pada posisi dimana
berkaitan penuh dengan ring gear, kontak plate menutup main switch
(terminal 30 dan C).
Akibat hubungan ini maka arus yang masuk ke motor cukup besar
sehingga motor berputar dengan momen yang lebih besar pula. Pada saat
yang sama, tegangan pada kedua ujung pull-in coil menjadi sama
sehingga tidak ada arus yang mengalir melalui kumparan ini. Plunger
kemudian ditahan pada posisinya hanya dengan gaya magnet yang
dihasilkan oleh hold-in coil.
Pinion dan ring berhubungan
c. Kun
Bila kunci kontak dikembalikan ke posisi OFF dari posisi START, maka
arus yang mengalir ke hold-in coil akan terputus sehingga plunger akan
kembali ke posisi semula, akibat dari dorongan pegas plunger. Dengan
demikian kontak utama (Main Contact) akan terbuka dan arus yang
mengalir ke field coil akan terputus, dan armatur akan berhenti berputar.
Berhentinya armature ini dibantu dengan pengaruh pengereman dari –
gesekan antara brush (sikat) dan Commutator. Motor starter tipe ini tidak
memerlukan mekanisme brake seperti yang digunakan pada motor starter
tipe konvensional karena motor starter tipe reduksi mempunyai gaya
inertia. Armature lebih kecil bila dibandingkan dengan tipe konvensional.
Kunci kontak pada posisi “OFF”
KEGIATAN BELAJAR II
Pengujian Sistem Starter
TUJUAN KHUSUS PEMBELAJARAN
Setelah mempelajari perbaikan motor starter ini, peserta dapat:
1. Menjelaskan cara mengetes motor starter
2. Menjelaskan cara memeriksa solenoid
3. Menjelaskan cara membongkar, memeriksa, mengganti dan merakit motor
starter
4. Menyebutkan cara menganalisa dan mengatasi gangguan yang terjadi pada
sistem starter
MATERI TEORI
Pemeriksaan dan pengujian motor starter dapat dilakukan dengan dua cara yaitu :
1. Pengujian dengan beban.
2. Pengujian tanpa beban.
A. PENGUJIAN DENGAN BEBAN.
1. Pemeriksaan Tegangan Kerja Motor Starter.
Pemeriksaan ini menunjukkan tegangan kerja sesungguhnya motor
starter pada saat memutar poros engkol.
Perhatikan gambar berikut :
Gambar 1. Memeriksa tegangan kerja ( motor starter dan batere )
Pemeriksaan dilakukan sebagai berikut :
a. Engine harus tidak hidup pada saat dilakukan “Starting” (Pompa
injeksi pada posisi stop, atau kabel solenoid bahan bakar dilepas)
b. Hubungkan Voltmeter seperti pada posisi (V1). Batas ukur voltmeter
disesuaikan dengan tegangan batere. Hidupkan motor starter dan
catat/perhatikan pembacaan alat ukur (voltmeter). Motor starter
harus beroperasi pada kecepatan putar normal dan hasil pengukuran
tidak boleh lebih rendah dari 9,5 volt.
c. Hubungkan voltmeter dengan batere seperti pada posisi (V2). Sekali
lagi hidupkan motor starter, catat hasil pengukuran. Perbedaan hasil
pengukuran menunjukkan adanya penurunan tegangan pada
rangkaian. Penurunan tegangan maksimum yang diizinkan adalah
0,5 volt. Bila perbedaan pengukuran lebih besar dari 0,5 volt, ini
menunjukkan adanya peningkatan tahanan pada rangkaian starter,
rangkaian harus diperiksa. Bila perbedaan berkisar 0,5 volt namun
hasil pengukuran rendah (misalnya 9 dan 9,5 volt), berarti ada
gangguan pada motor starter atau batere. Periksa motor starter dan
batere.
2. Pemeriksaan Penurunan Tegangan (Voltage Drop)
Perhatikan gambar berikut. Gambar ini menunjukkan beberapa tempat
yang harus diperiksa untuk menemuka gangguan (peningkatan tahanan)
pada rangkaian motor starter. Peningkatan tahanan ini diukur dengan
voltmeter yang lebih dikenal dengan istilah voltage drop. Pada
pemeriksaan ini digunakan voltmeter berskala kecil, yaitu 0 – 1 volt.
Catatan : Hati-hati dala
Memeriksa penurunan
tegangan.
Pemeriksaan dilakukan sebagai berikut :
Engine harus tidak hidup pada saat dilakukan “Starting” (Pompa injeksi
pada posisi stop, atau kabel solenoid bahan bakar dilepas)
a. Hubungkan Voltmeter seperti pada posisi (V1). Pembacaan
maksimum adalah 0,2 volt. Pembacaan lebih dari 0,2 volt bearti ada
gangguan pada kabel starter, sambungan-sambungan dan kunci
kontak.
b. Hubungkan voltmeter seperti posisi (V2). Pengukuran ini sama
seperti pengukuran V1, hanya tidak melalui kunci kontak. Nilai
pengukuran tidak boleh lebih dari 0,1 volt.
c. Hubungkan voltmeter seperti posisi (V3). Pengukuran ini untuk
memeriksa sambungan negative engine dengan negativ batere. Hasil
pengukuran tidak boleh lebih dari 0,1 volt.
d. Posisi V4 dilakukan untuk memeriksa hubungan negative engine
dengan negative rangka (frame). Pengukuran ini biasanya dilakukan
bila negative batere dihubungkan dengan rangka kendaraan, bukan
pada engine.
Catatan : a. Semua pengukuran di atas dilakukan dengan
“men-start” engine.
b. Batere harus dalam keadaan baik.
Spesifikasi Berbeban :
e. Jika pemakaian tegangan melebihi nilai tersebut di atas dan putaran
starter masih lambat, berarti motor starter harus dibongkar dan
diperiksa.
B. PENGUJIAN TANPA BEBAN.
Gangguan pada motor starter, pada dasarnya dapat diketahui dari adanva
pemakaian arus yang terlalu besar dan penurunan tegangan yang tidak normal.
Besar kecilnya pemakaian arus dapat diketahui dengan cara :
1. Memasang Ammeter secara seri pada starter
2. Menggunakan High Discharge Tester
1. Pengujian kerja motor starter dengan Ammeter.
Langkah-langkah pengujian :
a. Jepitlah starter dengan ragum untuk mencegah hal-hal yang tidak
diinginkan
b. Kemudian Ammeter dipasang secara seri seperti gambar 1
– Positif (+) Batere -> Positif (+) Ammeter
– Negatif (-) Ammeter -> Terminal 30 (B)
– Negatif (-) Batere -> Bodi starter
Gambar 3. Rangkaian pemasangan Ammeter.
c. Kemudian starter kita hidupkan
d. Amati besamya penunjukan jarum Ammeter, setelah jelas
membacanya, starter dimatikan.
e. Amati basarnya penunjukan jarum Voltmeter, apakah sesuai
dengan spesifikasi.
f. Untuk menentukan apakah sistem starter masih baik atau tidak,
perhatikan nilai umum dibawah ini:
Spesifikasi tanpa beban :
g. Jika pemakaian arus melebihi nilai tersebut di atas dan putaran
starter masih lambat, berarti motor starter harus dibongkar dan
diperiksa.
2. Pengujian dengan High Discharge Tester
Langkah-langkah Pengujian :
a. Hubungkan High Discharge Tester dengan sistem starter seperti
di bawah ini.
. Rangkaian pemasangan dengan high discharge tester
b. Putarlah tombol pengatur (load control) ke kiri sampai kedudukan
minimum
c. Motor starter dihidupkan
d. Amati besarnya jarum Voltmeter, setelah jelas membaca matikan
starter
e. Putarlah tombol pengatur (load control) ke kanan, sampai voltmeter
menunjukkan angka yang sama pada waktu distarter
f. Lihat besarnya penunjukkan jarum Ammeter, angka itu sama
dengan besarnya arus pada waktu starter
g. Jika pemakaian arus melebihi dari nilai pada table umum di atas
berarti motor starter harus dibongkar dan diperiksa.
KEGIATAN BELAJAR III
Pemeriksaan Motor Starter
TUJUAN KHUSUS PEMBELAJARAN
Setelah mempelajari pemeriksaan motor starter ini, peserta dapat :
1. Menjelaskan cara memeriksa solenoid.
2. Menjelaskan cara membongkar, memeriksa, mengganti dan merakit motor
starter.
3. Menjelaskan cara menganalisa dan mengatasi gangguan yang terjadi pada
sistem starter.
A. MEMERIKSA DAN MEMPERBAIKI SOLENOID (MAGNETIC SWITCH)
Magnetic Switch (solenoid) berfungsi untuk menghubungkan motor starter
dengan batere, kadangkala dapat mengalami gangguan yang menyebabkan
motor starter berputar lambat, berputar terus menerus dan bahkan tidak
berputar.
Gangguan itu biasanya disebabkan :
1. Hubungan terminal kumparan kurang baik
2. Hubungan plat kontak tidak baik atau plat kontak mencair
3. Kumparan solenoid (pull-in coil dan hold-in coil) bocor.
Langkah-langkah pemeriksaan dan perbaikan :
1. Hubungan terminal kumparan solenoid tidak baik.
Tidak baiknya hubungan terminal kumparan solenoid, dapat disebabkan
oleh terjadinya karatan atau hubungan yang kendor.
Perbaikannya cukup bersihkan bagian yang terkena karat dan
kencangkan baut pengikat yang kendor.
2. Hubungan plat kontak tidak baik atau plat kontak mencair.
Kejadian ini biasanya disebabkan oleh :
a. Penggunaan motor starter yang terus menerus.
b. Permukaan plat kontak kotor atau terbakar.
Perbaikannya, gunakan solder untuk mencairkan terminal 50 dan
lepaskan baut pengikat tutup solenoid, lalu tutup solenoid dilepas dan
gunakan kertas gosok atau kikir untuk meratakan permukaan plat
kontak.
3. Kumparan solenoid bocor.
Untuk mengetahui rusak tidaknya kumparan solenoid, maka lepaskan
solenoid dari motor starter dan ukurlah besarnya tahanan antara
terminal kumparan solenoid dengan massa dan antara terminal
kumparan solenoid dengan terminal ke starter.
Jika tahanan di kedua tempat itu berbeda banyak, berarti kumparan
solenoid tidak baik.
Periksa kebocoran pull-in coil, periksa kemungkinan terdapat hubungan
antara terminal 50 (St) dan terminal C (M).
Periksa kebocoran hold-in coil, periksa kemungkinan terdapat hubungan
antara terminal 50 (St) dengan bodi (massa).
Pemeriksaan pull-in dan hold-in coil
Perbaikan Sistem Starter 3. Pemeriksaan Plunger.
Tekan plunger lalu dilepas, plunger harus bergerak balik dengan segera
ke posisi semula.
Pemeriksaan plunger
B. MEMBONGKAR, MEMERIKSA DAN MERAKIT MOTOR STARTER
1. MEMBONGKAR MOTOR STARTER TIPE BIASA
Bongkar/lepaskan komponen-komponen dengan menggunakan peralatan
yang tepat sesuai dengan urutan nomor seperti pada gambar di bawah ini.
Perbaikan Sistem Starter Urutan pembongkaran motor starter
2. PEMERIKSAAN DAN PERBAIKAN MOTOR STATER
a. Poros armature dan bantalan
Pemeriksaan Poros dan Bantalan
1) Periksa ujung poros armature, bushing rum ah penggerak dan bushing
ujung, kemungkinan aus/cacat
2) Buka tutup bushing dan keluarkan bushing, cocokkan lubang bushing
dengan alur rumah lalu pasang bushing yang baru dengan jalan di tekan.
3) Haluskan bushing untuk mendapat celah sesuai dengan spesifikasi Celah
oli: std 0,035 – 0,077 mm
4) Bersihkan lubang dan pasang tutup bushing yang baru
b. Komutator
1) Periksa Run out commutator:
Run out lingkaran maksimum : 0,4 (0,016 inci). Bila run outnya lebih
besarnya dari harga maksimumnya, perbaiki dengan jalan membubut.
Pemeriksaan Run out
2) Pengukuran diameter luar komutator.
Ukurlah diameter luar komutator dengan menggunakan vernier caliper
seperti terlihat pada gambar 8.
Diameter standar: 28 mm (1,10 in)
Diameter minim : 27 mm (1,06)
Bila diameter comutator kurang dari harga minim, maka armature harus
diganti.
Pengukuran diameter komutator
3) Perbaikan Komutator
a) Permukaan yang kotor dan terbakar, gosok dengan kertas ampelas
kalau perlu dibubut
b) Jika kedalaman mica dibawah limit, perbaiki dengan menggunakan
mata gergaji besi
c) Haluskan pinggirnya dengan kikir
Perbaikan comulator
c. Pemeriksaan Armature Assembly
Pemeriksaan ini dapat dilakukan dengan menggunakan Ohmmeter atau
Growler. Tujuannya adalah untuk memeriksa kemungkinan terjadinya
hubungan singkat antar lilitan dengan inti armature dan poros, serta
kontinuitas lilitan armature.
· Pemeriksaan dengan Ohmmeter
Memeriksa hubungan massa (a) dan hubungan antar segmen (b)
· Pemeriksaan dengan Growler (Armature Tester).
Letakkan armature di atas alat pengetes lalu tempelkan daun gergaji pada
inti armature dan armature diputar. Jika daun gergaji tertarik atau bergetar
berarti ada hubungan singkat pada armature dan harus diganti.
Periksa kemungkinan ada hubungan antara komutator dan coil armature.
Pengetesan hubungan singkat
d. Pemeriksaan Kumparan Medan (Field Coil)
1) Periksa kumparan medan kemungkinan ada hubungan antara ujung-
ujung kawat ujung. Jika tidak ada hubungan berarti ada yang terputus
pada kumparan medan dan harus diganti.
2) Periksa kemungkinan ada hubungan antara ujung kumparan medan dan
frame. Jika ada hubungan ganti kumparan medan
Pemeriksaan kumparan medan
e. Sikat-sikat (brush)
1) Ukur panjang sikat
Panjang standar : 16 mm (0,63 in)
Panjang minimum : 10 mm (0,39 in)
Bila panjang sikat kurang dari harga minimum, gantilah brush dan bentuk
dengan menggunakan kertas ampelas
Panjang sikat
2) Pegas sikat (brush spring)
Ukur beban brush spring dengan menggunakan pull scale
Bacalah pull scale pada saat brush spring terpisah dari brush
Standar beban terpasang : 1,4-1,6 kg Positif (+) Ammeter.
– Negatif (-) Ammeter -> Terminal 30 (B).
– Negatif (-) Batere -> Bodi starter.
c. Kemudian starter kita hidupkan.
d. Amati besamya penunjukkan jarum Ammeter, setelah jelas
membacanya, starter dimatikan.
e. Untuk menentukan apakah sistem starter masih baik atau tidak,
perhatikan nilai umum dibawah ini:
Spesifikasi Tanpa Beban :
f. Jika pemakaian arus melebihi nilai tersebut di atas dan putaran
starter masih lambat, berarti motor starter harus dibongkar dan
diperiksa.
3.2. Pengujian dengan High Discharge Tester
Langkah-langkah Pengujian :
a. Hubungkan High Discharge Tester dengan sistem starter seperti
gambar di bawah ini :
b. Putarlah tombol pengatur (load control) ke kiri sampai kedudukan
minimum.
c. Motor starter dihidupkan.
d. Amati besarnya jarum Voltmeter, setelah jelas membaca matikan
starter.
e. Putarlah tombol pengatur (load control) ke kanan, sampai voltmeter
menunjukkan angka yang sama pada waktu distarter.
f. Lihat besarnya penunjukkan jarum Ammeter, angka itu sama
dengan besarnya arus pada waktu starter.
g. Jika pemakaian arus melebihi dari nilai pada table umum di atas
berarti motor starter harus dibongkar dan diperiksa.
B. PEMERIKSAAN FISIK KOMPONEN MOTOR STARTER
Lakukan pemeriksaan komponen motor starter yang meliputi pekerjaan :
1. Memeriksa magnetic switch (solenoid)
a. Pull-in coil dan Hold-in coil
b. Plat kontak (main switch)
c. Plunger
2. Memeriksa motor starter
a. Field coil
b. Brush
c. Armature
d. Clutch and pinion gear
– HIGH DISCHARGE TESTER
Meliputi pekerjaan :
1. Memeriksa Tegangan Kerja motor starter dan batere.
2. Memeriksa Penurunan Tegangan (Voltage Drop).
3. Memeriksa Besar Pengeluaran Arus.
PEMERIKSAAN FISIK KOMPONEN MOTOR STARTER
Lakukan pemeriksaan komponen motor starter yang meliputi pekerjaan :
1. Memeriksa magnetic switch (solenoid)
a. Pull-in coil dan Hold-in coil
b. Plat kontak (main switch)
c. Plunger
2. Memeriksa motor starter
a. Field coil
b. Brush
c. Armature
d. Clutch and pinion gear
Perbaikan Sistem Starter
Diberikan mobil engine hidup pada stand dan SOP, pada akhir pelajaran peserta
diharapkan dapat :
1. Melepas motor starter dari Engine sesuai SOP
2. Mermasang motor starter pada engine sesuai dengan SOP
Alat dan Bahan :
1. Kendaraan/engine hidup pada stand
2. Alat-alat tangan
3. SOP
Melepas Motor Starter :
Langkah kerja :
1. Tempatkan mobil/engine hidup pada stand diarea yang telah disediakan
2. Buka tutup engine
3. Pasang Bodi pender cover dan seat cover
4. Lepaskan kabel negatif batere terlebih dahulu, lalu kabel pasitif batere
5. Lepaskan kabel dari terminal :
· B. Motor starter
· ST. Motor starter
6. Lepas baut pengikat Motor starter
7. Keluarkan Motor starter dari dudukannya
Memasang Motor Storter :
Langkah Kerja :
1. Pasang/tempatkan motor starter pada dudukannya
2. Pasang baut pengikat motor starter
3. Pasang kabel ke terminal
· B. Motor starter
· ST. Motor starter
4. Pasang kabel motor starter pada terminal positif batere dan kabel massa ke
terminal negatif batere
5. Jika rangkaian sudah terpasang, yakinkan bahwa rangkaian sudah benar
6. Operasikan system starter
sistem starter bergerak searah jarum jam melalui titik start yaitu waktu pada saat mobil mau berjalan dilatasi waktu .
sedangkan baut bila sekrup kekanan berarti menutup sekrup dan bergerak kekiri adalah membuka sekrup .
sedangkan motor bisa putar kiri dan putar kanan dengan membalik fasa
Quadcopter

Komponen Dan Prinsip Kerja Quadcopter
Komponen quadcopter secara prinsip dibagi dalam 2 bagian utama, yaitu perangkat keras (hardware) quadcopter dan perangkat lunak (software) quadcopter. Quadcopter bergerak menggunakan 4 buah baling-baling yang dipasang sedemikian rupa dengan kecepatan putaran baling-baling tersebut dikendalikan oleh perangkat lunak (sofware) quadcopter sebagai pengatur arah gerakan quadcopter.Komponen Quadcopter
Pada komponen perangkat keras (hardware) quadcopter,
terdiri dari sistem mekanik dan elektronik. Pada sistem elektronik,
quadcopter dibentuk oleh beberapa rangkaian elektronik sebagai berikut :
- Sensor
- Motor driver
- Microcontroller.
- Motor baling-baling
Komponen-komponen tersebut diletakan di
bagian tengah membentuk lingkaran atau kotak, serta empat baling-baling
di sekitarnya pada posisi yang bersilangan. Struktur penyusun
persilangan tersebut cukup tipis dan ringan, tetapi juga cukup kuat
untuk menghubungkan struktur keempat motor baling-baling. Setiap
baling-baling terhubung ke motor melalui reduction gear (roda gigi yang
mengurangi kecepatan putaran masukan pada keluarannya). Sumbu rotasi
setiap baling-balingnya selalu tetap dan paralel. Hal ini menunjukkan
bahwa struktur ini cukup kaku, dimana hanya kecepatan baling-baling yang
bisa divariasikan. Kecepatan baling-baling ini berperan penting
terhadap pergerakan dari quadcopter.
Sensor Pada Quadcopter
Pergerakan sebuah quadcopter bergantung
kepada informasi-informasi mengenai lingkungannya yang diperoleh melalui
sensor. Untuk mengetahui keadaan lingkungannya tersebut, quadcopter
dapat menggunakan banyak sensor sesuai keperluan. Terdapat beberapa
sensor yang dimiliki hampir setiap quadcopter. Sensor-sensor tersebut
diperlukan untuk mendukung pergerakan mendasar dari quadcopter,
diantaranya :
1. Global Positioning System (GPS)
GPS adalah sistem navigasi dengan
menggunakan satelit. Sistem ini dikelola oleh pemerintah Amerika Serikat
and bebas diakses oleh siapa saja. Sensor ini bekerja dengan menerima
data yang berisi waktu dan posisi satelit ketika data dikirimkan,
melalui sinyal yang dipancarkan oleh satelit GPS. Dengan menerima data
dari tiga satelit dengan posisi yang berbeda, data navigasi dapat
dihitung secara realtime. Data navigasi dapat berupa posisi, arah, dan
kecepatan pergerakan yang sedang terjadi.
2. Inertial Measurement Unit (IMU)
IMU merupakan sensor yang berfungsi
untuk menghitung percepatan serta orientasi arah pergerakan dari
kendaraan udara dengan menggunakan kombinasi dari sensor accelerometer
dan gyroscope. Dengan adanya IMU, kendaraan udara bisa menghitung dan
mengetahui pergerakan yang dilakukannya, sehingga dapat membantu
kendaraan tersebut untuk mengetahui posisi serta lintasan yang
dilaluinya tanpa menggunakan GPS (misalkan ketika tidak mendapatkan
sinyal GPS). Secara umum IMU bekerja dengan menggunakan tiga sensor
accelerometer yang digunakan untuk menghitung percepatan di sumbu x, y,
dan z. Nantinya, accelerometer akan dipadukan dengan gyroscope untuk
menentukan arah mana yang sedang diambil oleh quadcopter ketika
melakukan percepatan tersebut. Dengan mencatat dan menggabungkan semua
perhitungan tersebut, akan didapatkan posisi baru dari quadcopter yang
bergerak, serta jalur pergerakan yang diambilnya.
3. Ultrasonic Range Sensor
Sensor ini digunakan untuk mendeteksi
benda yang ada di sekitar quadcopter. Selain itu sensor ini juga dapat
digunakan untuk mengetahui ketinggian terbang yang dilakukan, dengan
cara mendeteksi benda yang berada di bawahnya. Hal ini berguna untuk
menjaga ketinggian terbang, misalnya ketika berada di dalam ruangan
tertutup.
4. Kamera
Pada quadcopter, kamera tidak hanya
digunakan sebagai alat untuk mengambil gambar saja, tapi juga dapat
digunakan sebagai sensor, misalkan untuk mendeteksi dan mengenali objek
tertentu. Hal ini dilakukan dengan bantuan teknik/algoritma tertentu,
misalkan image processing.
Prinsip Kerja Quadcopter
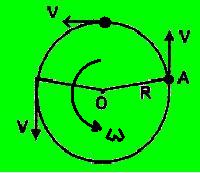
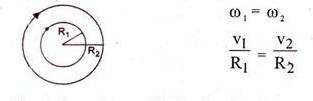
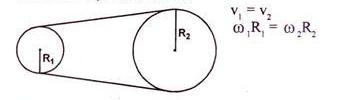
Quadcopter memiliki dua pasang baling-baling seperti yang terlihat pada gambar dibawah, dimana pasangan tersebut bergerak berlawanan arah dengan pasangan lainnya. Baling-baling bagian depan dan belakang quadcopter bergerak berlawanan arah jarum jam, sedangkan balingbaling bagian kiri dan kanan bergerak searah jarum jam. Konfigurasi arah berlawanan dari baling-baling ini dapat menggantikan kebutuhan untuk memiliki baling-baling di ekor sebagaimana yang dimiliki helikopter standar, yang digunakan untuk mengatur arah pergerakan
Quadcopter memiliki ketentuan tersendiri terhadap variasi kecepatan perputaran setiap baling-balingnya untuk dapat melakukan pergerakan tertentu. Dalam melakukan terbang melayang di udara, yang dikenal dengan sebutan hover, quadcopter perlu menggerakkan keempat baling-balingnya dengan kecepatan yang sama. Setiap pasangan baling-baling memiliki arah gaya dorong yang memiliki fungsi berbeda, satu pasang sebagai pendorong (pusher) dan satu pasang sebagai penarik (puller). Dengan adanya pergerakan yang menghasilkan gaya dorong serta gaya tarik yang melawan gaya gravitasi tersebut, quadcopter dapat terbang melayang di udara dengan stabil.

Selain gerakan melayang, quadcopter juga
memiliki aturan tersendiri untuk gerakan-gerakan lainnya. Beberapa
pergerakan pada quadcopter adalah :
Gerakan naik turun.
Untuk bergerak terbang ke atas dan ke
bawah, quadcopter perlu menaikkan atau menurunkan kecepatan putar setiap
baling-baling dengan jumlah yang sama. Menaikkan kecepatan akan
mengakibatkan quadcopter terbang ke atas, dan menurunkan kecepatan akan
mengakibatkan quadcopter terbang ke bawah.
Gerakan berputar pada sumbu datar (menggulung).
Untuk melakukan gerakan tersebut, perlu
dilakukan perubahan kecepatan perputaran baling-baling pada salah satu
pasangan baling-baling. Untuk berputar pada sumbu x (roll) perubahan
kecepatan dilakukan pada pasangan baling-baling kiri dan kanan,
sedangkan untuk berputar pada sumbu y (pitch) perubahan kecepatan
dilakukan pada pasangan baling-baling depan dan belakang. Perubahannya
adalah salah satu anggota pasangan baling-baling dikurangi kecepatannya
dan anggota pasangan baling-baling lainnya dinaikkan dengan selisih
kecepatan yang sama, sedangkan baling-baling lainnya dibiarkan dengan
kecepatan tetap. Dengan pengaturan seperti ini, quadcopter akan bergerak
memutar dari arah pasangan baling-baling yang berkecepatan lebih
rendah, ke arah pasangan baling-baling yang berkecepatan lebih tinggi.
Gerakan ke samping kanan dan kiri pada sumbu z (yaw).
Gerakan ini dilakukan dengan menurunkan
kecepatan satu pasang baling-baling, atas-bawah atau kiri-kanan, dan
menaikkan kecepatan satu pasangan baling-baling lainnya. Nantinya,
quadcopter akan bergerak berputar ke arah perputaran pasangan
baling-baling yang lebih lambat kecepatannya dibandingkan pasangan yang
lainnya.
Dengan sensor yang dimiliki quadcopter
tersebut, maka semua informasi dari setiap sensor tersebut diolah oleh
software dan digunakan sebagai pemandu pergerakan quadcopter.

Quadcopter adalah robot penjelajah udara Unmanned Aerial Vehicle (UAV) yang termasuk kategori UAV micro dan banyak digunakan oleh beberapa lembaga atau instansi. Robot quadcopter merupakan
UAV yang memiliki ciri khusus yang mudah dikenali yaitu memiliki empat
buah baling-baling motor yang digunakan sebagai penggeraknya.
Bentuk Quadcopter

Gambar diatas adalah salah satu bentuk robot quadcopter
yang digunakan dalam untuk pengambilan gambar dari suatu wilayah.
Quadcopter pada gambar diatas memiliki empat buah baling-baling yang
terpasang di bagian kiri dan kanan. Dengan empat buah baling-baling
tersebut memudahkan quadcopter
untuk bermanuver sehingga dengan cepat dapat bergerak kesegala arah.
Hal ini menjadi salah satu kelebihan dari quadcopter. Selain empat buah
baling-baling, quadcopter juga dilengkapi dengan sensor diantaranya
sensor Global Positioning System (GPS) yang digunakan untuk bernavigasi,
sensor Inertial Measurement Unit (IMU) yang berfungsi
untuk menghitung percepatan serta orientasi arah pergerakan, sensor
ultra sonic untuk mendeteksi keberadaan benda dan sensor-sensor lainnya
yang mendukung fungsi dan kinerja dari quadcopter.
Dengan manuverabilitas yang tinggi,
rancangan yang sederhana dan kelengkapan sensor yang digunakan, membuat
banyak peneliti menjadikan quadcopter sebagai komponen utama dalam
penelitiannya. Quadcopter juga digunakan dalam pendeteksian dan
pelacakan objek dengan menggunakan sensor kamera dan pembentukan formasi
untuk mengekplorasi ruangan pada suatu bangunan.
Kemampuan Quadcopter
Quadcopter memiliki beberapa kelebihan yang menjadikannya cocok untuk melakukan pekerjaan tertentu. Bentuknya yang kecil membuat quadcopter
cukup leluasa untuk bergerak di tempat-tempat yang sulit. Quadcopter
juga dapat terbang secara vertikal, yang berarti ia tidak memerlukan
landasan pacu untuk dapat terbang. Selain itu quadcopter juga dapat
bergerak ke delapan arah mata angin tanpa perlu memutar badannya
terlebih dahulu. Jika dibandingkan dengan kendaraan udara bersayap,
quadcopter jauh lebih unggul dalam hal manuver. Hal ini terkait dengan
lebih sedikitnya ruang gerak yang dibutuhkan dalam melakukan take off
ataupun melakukan pergantian arah.
Kelebihan Quadcopter
Kelebihan lainnya adalah quadcopter
memiliki baling-baling yang cukup kecil, sehingga lebih aman untuk
digunakan pada pekerjaan yang melibatkan interaksi dengan objek yang
dekat. Dari segi desain, quadcopter lebih sederhana jika dibandingkan
helikopter standar, yaitu dalam hal pembuatan, pemeliharaan, dan
perbaikan. Selain itu quadcopter juga memiliki kemampuan mengangkat
muatan dengan cukup baik walaupun ukurannya kecil. Kemampuan itu bisa
digunakanuntuk mendukung pekerjaannya, seperti membawa kamera untuk
mengambil gambar dari udara.

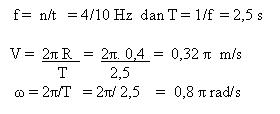
 Selanjutnya, beberapa besaran seperti
Selanjutnya, beberapa besaran seperti