
7 , 7 , 7 US$ balance control electronic Modern car
the fuel car works with a gasoline system using a dynamo starter that is driven by the current of the battery with a current of 10 - 30 AMPERE to turn the amperage dynamo as a charge and discharge means to process the fuel energy of the gasoline to work in balance on the electronic element; before entering the dynamo ampere through a transformer material or auto transformer switching dynamo amperage inside the modern car is called the output and input gates; on car systems now using microprocessor IC ( Integrated Circuit ) equipment and micro controller price range of about 7 $ US, the dynamo ampere when processed and controlled by gate In and Gate out ( regulator I / O ) will provide an electron signal signal to drive all systems in the car such as audio and video equipment as well as all instrumentation equipment on this modern car is made possible by replacing all the ignition triggers with both hydraulic electric - pneumatic control and Pulse width modulation ( 4 in 1 P W M ) process in car kinetic work system but by making the car lighter and more efficient, the spark plug and platinum and carburetor systems are replaced with electronic circuits except the coil and energy transmission through the flywheel that is still 70 percent of the electronic control system



XXX . XXX 4 Zero Electronic starter-alternators power hybrid vehicles
Faced with challenge, the automotive engineering community has spawned new architectures and a host of innovative products. From the fully electrical EV1, introduced by GM over ten years ago, the pendulum swung back to the "mild hybrid," a solution where the combustion engine is the dominant element, with a significant complement of electrical power. Now the pendulum is swinging again towards "full hybrid" solutions where electrical power plays the dominant role. The advent of cost-effective and practical fuel cells would cause the pendulum to swing all the way back to the original fully electrical solution.
A small step
It all begins with a small step: the integrated starter-alternator (ISA). Deceptively simple, this involves using the alternator as a starter motor. The moment we have combined these two functions into a fully reversible electrical machine we enter a word of countless creative developments. As a first step, we can cut off the engine when the car sits at a traffic light, counting on the alternator to make it jump as soon as we step on the accelerator ("start-stop" function). This cuts down on emissions when they are most noxious, while improving gas mileage.
It all begins with a small step: the integrated starter-alternator (ISA). Deceptively simple, this involves using the alternator as a starter motor. The moment we have combined these two functions into a fully reversible electrical machine we enter a word of countless creative developments. As a first step, we can cut off the engine when the car sits at a traffic light, counting on the alternator to make it jump as soon as we step on the accelerator ("start-stop" function). This cuts down on emissions when they are most noxious, while improving gas mileage.
Since a powerful starter is also a powerful generator, this combination enables a host of efficient electronic functions with high peak-power requirements. Here is a short list: electronic power steering (EPS), electronic turbo-assist, variable-speed aircon, electronic valve control, active suspensions and all the X-by-Wire. This "virtuous circle" scores on all fronts: more efficient actuators mean lower fuel consumption and to lower emissions. Electronic turbo and valve control yield improved performance and a further reduction in fuel consumption. For safety, comfort and driving satisfaction we have active suspensions, EPS and all the X-by-Wire.

The technological challenge of a starter-alternator is in the design of a power electronics module capable of delivering 3 kW at an ambient temperature of C. Figure 1 shows the basic block diagram and the schematic of the power section. In a mature implementation the system would be split into a hardware block mounted on the starter-alternator and a software block that is part of the main electronic control unit. In some platforms a Load Management Unit would supervise the power distribution to insure that critical loads have the right priority. The three-phase module with current and temperature sensing would be normally mounted on the starter-alternator itself.
The economics of adoption
In the automotive world new solutions are adopted to the extent that they are at substantial cost parity with established solution. Any additional performance is thrown in as an incentive to change. This creates an entry barrier to new technologies, as established solution have been cost reduced over many years, while new solutions are at the bottom of their learning curve. This has put a significant amount of pressure on semiconductor companies to develop whatever technology is necessary to meet the cost challenge.
In the automotive world new solutions are adopted to the extent that they are at substantial cost parity with established solution. Any additional performance is thrown in as an incentive to change. This creates an entry barrier to new technologies, as established solution have been cost reduced over many years, while new solutions are at the bottom of their learning curve. This has put a significant amount of pressure on semiconductor companies to develop whatever technology is necessary to meet the cost challenge.
From this point of view, one of the most appealing characteristics of the ISA of Figure 1 is that it fits into existing platforms with minimal modifications and negligible price premium. So it meets the basic adoption criteria, even when the platform is not ready to transition to the more advanced sub-systems.
This opportunity has injected new life into the 14 V power generating system that had been prematurely written off as inadequate to supply the power required by the new, more advanced functional blocks. Traditional alternators have been redesigned to provide more power and, with improved belts, to provide the "start-stop" function on small and mid-sized European cars.
More radical steps
To take the ISA to higher power levels, it needs to be installed in the drivetrain, between the engine and the transfer case. A good example of a drivetrain ISA is the General Motor's 2004 Chevrolet Sierra and Silverado "mild" hybrid trucks.
To take the ISA to higher power levels, it needs to be installed in the drivetrain, between the engine and the transfer case. A good example of a drivetrain ISA is the General Motor's 2004 Chevrolet Sierra and Silverado "mild" hybrid trucks.

Figure 2 shows how the electronic box feeds a motor that is integrated in a space-efficient way between the engine and transmission. This technique provides instant starts, 14 kW of electrical power and active damping of the drivetrain system, thus eliminating the flywheel (ISAD, where the D stands for damper).
A a stoplight, the gasoline engine stops running, but the accessories continue working on stored electrical power in the battery and in an ultracap. When the light turns green and the driver steps on the accelerator, the starter-alternator kicks in and the truck goes on the power of the battery while the engine starts, with little or no delay or disturbance.
To ensure full accessory capability while the engine is temporarily stopped, an electrically-driven hydraulic pump provides power steering (a prime candidate for replacement by an all-electric EPS, thus eliminating the hydraulic fluid). Also, an electric pump continues to circulate hot water if cabin heat is needed in the winter, and cold, dry air is supplied in the summer for an extended period through intelligent control of the conventional air conditioning system.
The powerplant of this hybrid is the same as the conventional versions of the truck (a 5.3-liter Vortec V-8 engine) and it can haul and tow just as much as its rugged gasoline counterpart. However, it gets 10-15 percent better fuel economy, thanks to regenerative braking and "start-stop" capability.
A 42V lead-acid battery pack and in the ultracap store the energy needed to support on-board electric accessories, or employed to operate power tools or other appliances off the pair of 110V, 20A outlets on one side of the bed.

A top-level block diagram of an ISA system is shown in Figure 3. Capacitors are added in parallel to the battery to overcome its sluggishness in storing and delivering the energy surges required by the electronic subsystems added to the platform. They also play a critical role in recovering the braking energy.

Figure 4 shows a more detailed diagram of a high performance sensorless implementation. Brushless DC motors tend to be preferred over induction motors on account of their efficiency and controllability.
People familiar with industrial servo drives will recognize some commonalities. However, to place this product in the proper contest we must keep in mind that annual production of industrial drives in the range of 7.5 to 12 kW is around 80,000 units. A single car platform could easily exceed that number.
From a technical viewpoint, power modules used for these drives must withstand stresses unheard of in the industrial field. They must be capable of delivering full power at an ambient temperature of 150C with very high efficiency and minimal parasitics. Last but not least, their cost must be consistent with the "adoption criteria" we have mentioned.
With the coming generation of 42 V mild hybrid, a half-bridge driver is built with two large power MOSFET dice (150 mm2 each) capable of switching 600 A on a 42 V bus. To reduce thermal stresses, the FETs are mounted on a ceramic substrate with a tempco that matches perfectly that of silicon. Advanced wirebonding techniques insure that the module can withstand temperature cycling and power cycling stresses normally associated with automotive environments. The power leads are designed to mate perfectly with a laminated buss bar to minimize stray inductance, which is less than 8 nH. To minimize EMI susceptibility, gate drive, sensing and protections are mounted on a small PCB that covers the module. The gate drive circuitry is capable of driving these FETs at 20 kHz. Sensing and translation of electrical parameters is also performed on this small board.

Further developments
The approach that GM took with the Sierra focused primarily on extra convenience and capability. Other platforms are being developed with fuel efficiency as the primary target. A 10 kW electric motor integrated into the drivetrain can be tapped instantly for quick accelerations. Considering that in normal driving conditions a V8 engine runs in the 2,000 to 3,000 RPM range, where it is quite inefficient, it could be profitably replaced with a V6, counting on the extra kick from the ISAD to retain that 'V8 feeling'. These newer platforms would capitalize on many of the advanced electronic sub-systems to further improve gas mileage, comfort, safety and driver's satisfaction, while reducing emissions.
The end of the road
Increasing the voltage does not reduce the power required by the loads, but it does reduce the current. The cost and difficulty of distributing, handling and conditioning current are significantly higher than those associated with handling voltage. Of course, utilities have known this from the very beginning and transmission lines operate at hundreds of kV.
As the power balance shifts from the engine to the electric motor, a higher bus voltage become more appealing from the point of view of cost, ease of design and efficiency. On this last point alone, we should keep in mind that conduction losses are proportional to the square of the current. All things being equal, if we increase the bus voltage from 42 V to 300 V, conduction losses go down by a factor of 50.
The impact on the cost of power electronics is less dramatic, but still significant. Conduction losses are the dominant losses in power semiconductors and they end up determining the size of silicon, of the package and of the heat exchanger. This is the reason why most of the 'full hybrids' on the road today operate on a bus voltage that ranges from 180 to 300 V. As a point of reference, the same module shown in Figure 6, built with 600 V IGBTs is capable of delivering 40 to 60% more output power.

In the near term, it is likely that two bus voltages will co-exist on the same platform. The 14 V bus is still very appealing because of the countless of functions that are readily available at 14 V. This requires a bidirectional DC-to-DC converter to shuttle power between the two busses.
The DC-to-DC converter will be a critical part of the system architecture, as it needs to handle whatever power is required to jump-start the car from 14 V. To minimize cost and increase power density, it can be integrated with the motor drive, sharing the same bus capacitors, buss-bar arrangement and heat exchanger. A 1.5 kW converter is shown in Figure 5 together with the bus capacitors shared with the ISA. It uses an un-conventional topology, known as "ripple steering" that minimizes the size of the reactive components. Conversion efficiency is 92% with 5%/0.7 V regulation and a power density of 2 W/cm3 (16 W/in3).

XXX . XXX 4 zero null A Short Course on Charging Systems

What is a Charging System?
The modern charging system hasn't changed much in over 40 years. It consists of the alternator, regulator (which is usually mounted inside the alternator) and the interconnecting wiring.
The purpose of the charging system is to maintain the charge in the vehicle's battery, and to provide the main source of electrical energy while the engine is running.
If the charging system stopped working, the battery's charge would soon be depleted, leaving the car with a "dead battery." If the battery is weak and the alternator is not working, the engine may not have enough electrical current to fire the spark plugs, so the engine will stop running.
If the battery is "dead", it does not necessarily mean that there is anything wrong with it. It is just depleted of its charge. It can be brought back to life by recharging it with a battery charger, or by running the engine so that the alternator can charge it. For more information on the battery, Click Here
.The main component in the charging system is the ALTERNATOR. The alternator is a generator that produces Alternating Current (AC), similar to the electrical current in your home. This current is immediately converted to Direct Current (DC) inside the alternator. This is because all modern automobiles have a 12 volt, DC electrical system.
A VOLTAGE REGULATOR regulates the charging voltage that the alternator produces, keeping it between 13.5 and 14.5 volts to protect the electrical components throughout the vehicle.
There is also a system to warn the driver if something is not right with the charging system. This could be a dash mounted voltmeter, an ammeter, or more commonly, a warning lamp. This lamp is variously labeled "Gen" Bat" and "Alt.". If this warning lamp lights up while the engine is running, it means that there is a problem in the charging system, usually an alternator that has stopped working. The most common cause is a broken alternator drive belt.
 The alternator is driven by a belt that is powered by the rotation of the engine. This belt goes around a pulley connected to the front of the engine's crankshaft and is usually responsible for driving a number of other components including the water pump, power steering pump and air conditioning compressor. On some engines, there is more than one belt and the task of driving these components is divided between them. These belts are usually referred to as: Fan Belt, Alternator Belt, Drive Belt, Power Steering Belt, A/C Belt, etc. More common on late model engines, one belt, called a Serpentine Belt will snake around the front of the engine and drive all the components by itself.
The alternator is driven by a belt that is powered by the rotation of the engine. This belt goes around a pulley connected to the front of the engine's crankshaft and is usually responsible for driving a number of other components including the water pump, power steering pump and air conditioning compressor. On some engines, there is more than one belt and the task of driving these components is divided between them. These belts are usually referred to as: Fan Belt, Alternator Belt, Drive Belt, Power Steering Belt, A/C Belt, etc. More common on late model engines, one belt, called a Serpentine Belt will snake around the front of the engine and drive all the components by itself.
On engines with separate belts for each component, the belts will require periodic adjustments to maintain the proper belt tension. On engines that use a serpentine belt, there is usually a spring loaded belt tensioner that maintains the tension of the belt, so no periodic adjustments are required. A serpentine belt is designed to last around 30,000 miles. Check your owner's manual to see how often yours should be replaced.
Alternator output is measured in both voltage and amperage. To understand voltage and amperage, you must also know about resistance, which is measured in ohms. An easy way to picture this is to compare the movement of electricity to that of running water. Water flows through a pipe with a certain amount of pressure. The size (diameter) of the pipe dictates how much resistance there will be to the flowing water. The smaller the pipe, the more resistance. You can increase the pressure to get more water to flow through, or you can increase the size of the pipe to allow more water to flow using less pressure. Since too much pressure can burst the pipe, we should probably restrict the amount of pressure being used. You get the idea, but how is this related to the flow of electricity?
Well, voltage is the same as water pressure. Amperage is like the amount or volume of water flowing through, while resistance is the size of the wire transmitting the current. Since too much voltage will damage the electrical components such as light bulbs and computer circuits, we must limit the amount of voltage. This is the job of the voltage regulator. Too much water pressure and things could start breaking. Too much voltage and things could start burning out.
Let's get technical
Now, let's go a little deeper and see how these charging system components actually work to produce the electrical power that a modern automobile requires.
The Alternator
 The alternator uses the principle of electromagnetism to produce current. The way this works is simple. If you take a strong magnet and pass it across a wire, that wire will generate a small voltage. Take that same wire and loop it many times, than if you pass the same magnet across the bundle of loops, you create a more sizable voltage in that wire.
The alternator uses the principle of electromagnetism to produce current. The way this works is simple. If you take a strong magnet and pass it across a wire, that wire will generate a small voltage. Take that same wire and loop it many times, than if you pass the same magnet across the bundle of loops, you create a more sizable voltage in that wire.
There are two main components that make up an alternator. They are the rotor and the stator. The rotor is connected directly to the alternator pulley. The drive belt spins the pulley, which in turn spins the rotor. The stator is mounted to the body of the alternator and remains stationary. There is just enough room in the center of the stator for the rotor to fit and be able to spin without making any contact.
The stator contains 3 sets of wires that have many loops each and are evenly distributed to form a three phase system. On some systems, the wires are connected to each other at one end and are connected to a rectifier assembly on the other end. On other systems, the wires are connected to each other end to end, and at each of the three connection points, there is also a connection to the rectifier. More on what a rectifier is later.
 The rotor contains the powerful magnet that passes close to the many wire loops that make up the stator. The magnets in the rotor are actually electro magnets, not a permanent magnets. This is done so that we can control how much voltage the alternator produces by regulating the amount of current that creates the magnetic field in the rotor. In this way, we can control the output of the alternator to suit our needs, and protect the circuits in the automobile from excessive voltage.
The rotor contains the powerful magnet that passes close to the many wire loops that make up the stator. The magnets in the rotor are actually electro magnets, not a permanent magnets. This is done so that we can control how much voltage the alternator produces by regulating the amount of current that creates the magnetic field in the rotor. In this way, we can control the output of the alternator to suit our needs, and protect the circuits in the automobile from excessive voltage.
Now we know that every magnet has a north and a south pole and electro magnets are no exception. Our rotor has two interlocking sections of electro magnets that are arranged so that there are fingers of alternating north and south poles. that are evenly distributed on the outside of the rotor.
When we spin the rotor inside the stator and apply current to the rotor through a pair of brushes that make constant contact with two slip rings on the rotor shaft. This causes the rotor to become magnetized. The alternating north and south pole magnets spin past the three sets of wire loops in the stator and produce a constantly reversing voltage in the three wires. In other words, we are producing alternating current in the stator.
Now, we have to convert this alternating current to direct current current. This is done by using a series of 6 diodes that are mounted in a rectifier assembly. A diode allows current to flow only in one direction. If voltage tries to flow in the other direction, it is blocked. The six diodes are arranged so that all the voltage coming from the alternator is aligned in one direction thereby converting AC current into DC current.
 There are 2 diodes for each of the three sets of windings in the stator. The two diodes are facing in opposite directions, one with its north pole facing the windings and the other with its south pole facing the windings. This arrangement causes the AC current coming out of the windings to be converted to DC current before it leaves the alternator through the B terminal. Connected to the B terminal of the alternator is a fairly heavy wire that runs straight to the battery.
There are 2 diodes for each of the three sets of windings in the stator. The two diodes are facing in opposite directions, one with its north pole facing the windings and the other with its south pole facing the windings. This arrangement causes the AC current coming out of the windings to be converted to DC current before it leaves the alternator through the B terminal. Connected to the B terminal of the alternator is a fairly heavy wire that runs straight to the battery.
Current to generate the magnetic field in the rotor comes from the ignition switch and passes through the voltage regulator. Since the rotor is spinning, we need a way to connect this current from the regulator to the spinning rotor. This is accomplished by wires connected to two spring loaded brushes that rub against two slip rings on the rotor's shaft. The voltage regulator monitors the voltage coming out of the alternator and, when it reaches a threshold of about 14.5 volts, the regulator reduces the current in the rotor to weaken the magnetic field. When the voltage drops below this threshold, the current to the rotor is increased.
There is another circuit in the alternator to control the charging system warning lamp that is on the dash. Part of that circuit is another set of diodes mounted inside the alternator called the diode trio. The diode trio takes current coming from the three stator windings and passes a small amount through three diodes so that only the positive voltage comes through. After the diodes, the wires are joined into one wire and sent out of the alternator at the L connection. It then goes to one side of the dash warning lamp that is used to tell you when there is a problem with the charging system. The other side of the lamp is connected to the run side of the ignition switch. If both sides of the warning lamp have equal positive voltage, the lamp will not light. Remove voltage from one side and the lamp comes on to let you know there is a problem.
This system is not very efficient. There are many types of malfunctions of the charging system that it cannot detect, so just because the lamp is not lit does not mean everything is ok. A volt meter is probably the best method of determining whether the charging system is working properly
The Voltage Regulator
The voltage regulator can be mounted inside or outside of the alternator housing. If the regulator is mounted outside (common on some Ford products) there will be a wiring harness connecting it to the alternator.
The voltage regulator controls the field current applied to the spinning rotor inside the alternator. When there is no current applied to the field, there is no voltage produced from the alternator. When voltage drops below 13.5 volts, the regulator will apply current to the field and the alternator will start charging. When the voltage exceeds 14.5 volts, the regulator will stop supplying voltage to the field and the alternator will stop charging. This is how voltage output from the alternator is regulated. Amperage or current is regulated by the state of charge of the battery. When the battery is weak, the electromotive force (voltage) is not strong enough to hold back the current from the alternator trying to recharge the battery. As the battery reaches a state of full charge, the electromotive force becomes strong enough to oppose the current flow from the alternator, the amperage output from the alternator will drop to close to zero, while the voltage will remain at 13.5 to 14.5. When more electrical power is used, the electromotive force will reduce and alternator amperage will increase. It is extremely important that when alternator efficiency is checked, both voltage and amperage outputs are checked. Each alternator has a rated amperage output depending on the electrical requirements of the vehicle.
The charging system gauge or warning lamp monitors the health of the charging system so that you have a warning of a problem before you get stuck.
When a charging problem is indicated, you can still drive a short distance to find help unlike an oil pressure or coolant temperature problem which can cause serious engine damage if you continue to drive. The worst that can happen with a charging system problem is that you get stuck in a bad location.
A charging system warning lamp is a poor indicator of problems in that there are many charging problems that it will not recognize. If it does light while you are driving, it usually means the charging system is not working at all. The most common cause of this is a broken alternator belt.
There are two types of gauges used to monitor charging systems on some vehicles: a voltmeter which measures system voltage and an ammeter which measures amperage. Most modern cars that have gauges use a voltmeter because it is a much better indicator of charging system health. A mechanic's voltmeter is usually the first tool a technician uses when checking out a charging system
 A modern automobile has a 12 volt electrical system. A fully charged battery will read about 12.5 volts when the engine is not running. When the engine is running, the charging system takes over so that the voltmeter will read 14 to 14.5 volts and should stay there unless there is a heavy load on the electrical system such as wipers, lights, heater and rear defogger all operating together while the engine is idling at which time the voltage may drop. If the voltage drops below 12.5, it means that the battery is providing some of the current. You may notice that your dash lights dim at this point. If this happens for an extended period, the battery will run down and may not have enough of a charge to start the car after shutting it off. This should never happen with a healthy charging system because as soon as you step on the gas, the charging system will recharge the battery. If the voltage is constantly below 14 volts, you should have the system checked. If the voltage ever goes above 15 volts, there is a problem with the voltage regulator. Have the system checked as soon as possible as this "overcharging" condition can cause damage to your electrical system.
A modern automobile has a 12 volt electrical system. A fully charged battery will read about 12.5 volts when the engine is not running. When the engine is running, the charging system takes over so that the voltmeter will read 14 to 14.5 volts and should stay there unless there is a heavy load on the electrical system such as wipers, lights, heater and rear defogger all operating together while the engine is idling at which time the voltage may drop. If the voltage drops below 12.5, it means that the battery is providing some of the current. You may notice that your dash lights dim at this point. If this happens for an extended period, the battery will run down and may not have enough of a charge to start the car after shutting it off. This should never happen with a healthy charging system because as soon as you step on the gas, the charging system will recharge the battery. If the voltage is constantly below 14 volts, you should have the system checked. If the voltage ever goes above 15 volts, there is a problem with the voltage regulator. Have the system checked as soon as possible as this "overcharging" condition can cause damage to your electrical system. If you think of electricity as water, voltage is like water pressure, whereas amperage is like the volume of water. If you increase pressure, then more water will flow through a given size pipe, but if you increase the size of the pipe, more water will flow at a lower pressure. An ammeter will read from a negative amperage when the battery is providing most of the current thereby depleting itself, to a positive amperage if most of the current is coming from the charging system. If the battery is fully charged and there is minimal electrical demand, then the ammeter should read close to zero, but should always be on the positive side of zero. It is normal for the ammeter to read a high positive amperage in order to recharge the battery after starting, but it should taper off in a few minutes. If it continues to read more than 10 or 20 amps even though the lights, wipers and other electrical devices are turned off, you may have a weak battery and should have it checked.
If you think of electricity as water, voltage is like water pressure, whereas amperage is like the volume of water. If you increase pressure, then more water will flow through a given size pipe, but if you increase the size of the pipe, more water will flow at a lower pressure. An ammeter will read from a negative amperage when the battery is providing most of the current thereby depleting itself, to a positive amperage if most of the current is coming from the charging system. If the battery is fully charged and there is minimal electrical demand, then the ammeter should read close to zero, but should always be on the positive side of zero. It is normal for the ammeter to read a high positive amperage in order to recharge the battery after starting, but it should taper off in a few minutes. If it continues to read more than 10 or 20 amps even though the lights, wipers and other electrical devices are turned off, you may have a weak battery and should have it checked.
There are a number of things that can go wrong with a charging system:
- Insufficient Charging OutputIf one of the three stator windings failed, the alternator would still charge, but only at two thirds of its normal output. Since an alternator is designed to handle all the power that is needed under heavy load conditions, you may never know that there is a problem with the unit. It might only become apparent on a dark, cold rainy night when the lights, heater, windshield wipers and possible the seat heaters and rear defroster are all on at once that you may notice the lights start to dim as you slow down. If two sets of windings failed, you will probably notice it a lot sooner
It is more common for one or more of the six diodes in the rectifier to fail. If a diode burns out and opens one of the circuits, you would see the same problem as if one of the windings had failed. The alternator will run at a reduced output. However, if one of the diodes were to short out and allow current to pass in either direction, other problems will occur. A shorted diode will allow AC current to pass through to the automobile's electrical system which can cause problems with the computerized sensors and processors. This condition can cause the car to act unpredictably and cause all kinds of problems. - Too much voltageA voltage regulator is designed to limit the voltage output of an alternator to 14.5 volts or less to protect the vehicle's electrical system. If the regulator malfunctions and allows uncontrolled voltage to be released, you will see bulbs and other electrical components begin to fail. This is a dangerous and potentially costly problem. Fortunately, this type of failure is very rare. Most failures cause a reduction of voltage or amperage.
- NoiseSince the rotor is always spinning while the engine is running, there needs to be bearings to support the shaft and allow it to spin freely. If one of those bearings were to fail, you will hear a grinding noise coming from the alternator. A mechanic's stethoscope can be used to confirm which of the spinning components driven by the serpentine belt is making the noise.
The most common repair is the replacement of the alternator with a new or rebuilt one. A properly rebuilt alternator is as good as a new alternator and can cost hundreds less than purchasing a brand new one.
Labor time to replace an alternator is typically under an hour unless your alternator is in a hard to access location. Most alternators are easily accessible and visible on the top of the engine.
Replacing an alternator is usually an easy task for a backyard mechanic and rebuilt alternators are readily available for most vehicles at the local auto parts store. The most important task for the do-it-yourselfer is to be careful not to short anything out. ALWAYS DISCONNECT THE BATTERY BEFORE REPLACING AN ALTERNATOR.
Alternators can be repaired by a knowledgeable technician, but in most cases, it is not economical to do this. Also, since the rest of the alternator is not touched, a repair job is usually not guaranteed.
In some cases, if the problem is diagnosed as a bad voltage regulator, the regulator can be replaced without springing for a complete rebuild. The problem with this is that there will be an extra labor charge for disassembling the alternator in order to get to the internal regulator. That extra cost, along with the cost of the replacement regulator, will bring the total cost close to the cost of a complete (and guaranteed) rebuilt.
This is not the case when the regulator is not inside the alternator. In those cases, the usual practice is to just replace the part that is bad.
XXX . XXX 4 zero null 0 Design Considerations for Low Voltage Claw Pole Type Integrated Starter Generator (ISG) Systems
Due to the need for improved fuel consumption and the trend towards increasing the electrical content in automobiles, integrated starter generator (ISG) systems are being considered by the automotive industry. In this paper, in order to change the conventional generator of a vehicle, a belt driven integrated starter generator is considered. The overall ISG system, the design considerations for the claw pole type AC electric machine and a low voltage very high current power stage implementation are discussed. Test data on the low voltage claw pole type machine is presented, and a large current voltage source DC/AC inverter suitable for low voltage integrated starter generator operation is also presented. A metal based PCB (Printed Circuit Board) power unit to attach the 4-parallel MOS-FETs is used to achieve extremely high current capability. Furthermore, issues related to the torque assistance during vehicle acceleration and the generation/regeneration characteristics are discussed. A prototype with the capability of up to 1000 A and 27 V is designed and built to validate the kilo-amp inverter.
Charging Lead Acid
Learn how to optimize charging conditions to extend service life.
The lead acid battery uses the constant current constant voltage (CC/CV) charge method. A regulated current raises the terminal voltage until the upper charge voltage limit is reached, at which point the current drops due to saturation. The charge time is 12–16 hours and up to 36–48 hours for large stationary batteries. With higher charge currents and multi-stage charge methods, the charge time can be reduced to 8–10 hours; however, without full topping charge. Lead acid is sluggish and cannot be charged as quickly as other battery systems.
Lead acid batteries should be charged in three stages, which are [1] constant-current charge, [2] topping charge and [3] float charge. The constant-current charge applies the bulk of the charge and takes up roughly half of the required charge time; the topping charge continues at a lower charge current and provides saturation, and the float charge compensates for the loss caused by self-discharge.
During the constant-current charge, the battery charges to about 70 percent in 5–8 hours; the remaining 30 percent is filled with the slower topping charge that lasts another 7–10 hours. The topping charge is essential for the well-being of the battery and can be compared to a little rest after a good meal. If continually deprived, the battery will eventually lose the ability to accept a full charge and the performance will decrease due to sulfation. The float charge in the third stage maintains the battery at full charge. Figure 1 illustrates these three stages.
Lead acid batteries should be charged in three stages, which are [1] constant-current charge, [2] topping charge and [3] float charge. The constant-current charge applies the bulk of the charge and takes up roughly half of the required charge time; the topping charge continues at a lower charge current and provides saturation, and the float charge compensates for the loss caused by self-discharge.
During the constant-current charge, the battery charges to about 70 percent in 5–8 hours; the remaining 30 percent is filled with the slower topping charge that lasts another 7–10 hours. The topping charge is essential for the well-being of the battery and can be compared to a little rest after a good meal. If continually deprived, the battery will eventually lose the ability to accept a full charge and the performance will decrease due to sulfation. The float charge in the third stage maintains the battery at full charge. Figure 1 illustrates these three stages.
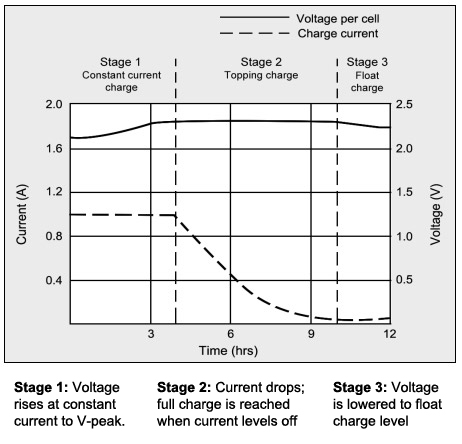 Figure 1: Charge stages of a lead acid battery. The battery is fully charged when the current drops to a set low level. The float voltage is reduced. Float charge compensates for self-discharge that all batteries exhibit. Courtesy of Cadex |
The switch from Stage 1 to 2 occurs seamlessly and happens when the battery reaches the set voltage limit. The current begins to drop as the battery starts to saturate; full charge is reached when the current decreases to 3–5 percent of the Ah rating. A battery with high leakage may never attain this low saturation current, and a plateau timer takes over to end the charge.
The correct setting of the charge voltage limit is critical and ranges from 2.30V to 2.45V per cell. Setting the voltage threshold is a compromise and battery experts refer to this as “dancing on the head of a needle.” On one hand, the battery wants to be fully charged to get maximum capacity and avoid sulfation on the negative plate; on the other hand, over-saturation by not switching to float charge causes grid corrosion on the positive plate. This also leads to gassing and water-loss.
Temperature changes the voltage and this makes “dancing on the head of a needle” more difficult. A warmer ambient requires a slightly lower voltage threshold and a colder temperature prefers a higher setting. Chargers exposed to temperature fluctuations include temperature sensors to adjust the charge voltage for optimum charge efficiency.
The charge temperature coefficient of a lead acid cell is –3mV/°C. Establishing 25°C (77°F) as the midpoint, the charge voltage should be reduced by 3mV per cell for every degree above 25°C and increased by 3mV per cell for every degree below 25°C. If this is not possible, it is better to choose a lower voltage for safety reasons. Table 2 compares the advantages and limitations of various peak voltage settings.
2.30V to 2.35V/cell
|
2.40V to 2.45V/cell
| |
|---|---|---|
Advantages
|
Maximum service life; battery stays cool; charge temperature can exceed 30°C (86°F).
|
Higher and more consistent capacity readings; less sulfation.
|
Limitations
|
Slow charge time; capacity readings may be inconsistent and declining with each cycle. Sulfation may occur without equalizing charge.
|
Subject to corrosion and gassing. Needs water refill. Not suitable for charging at high room temperatures, causing severe overcharge.
|
Table 2: Effects of charge voltage on a small lead acid battery.
Cylindrical lead acid cells have higher voltage settings than VRLA and starter batteries.
Cylindrical lead acid cells have higher voltage settings than VRLA and starter batteries.
Once fully charged through saturation, the battery should not dwell at the topping voltage for more than 48 hours and must be reduced to the float voltage level. This is especially critical for sealed systems because they are less tolerant to overcharge than the flooded type. Charging beyond the specified limits turns redundant energy into heat and the battery begins to gas.
The recommended float voltage of most flooded lead acid batteries is 2.25V to 2.27V/cell. Large stationary batteries at 25°C (77°F) typically float at 2.25V/cell. Manufacturers recommend lowering the float charge when the ambient temperature rises above 29°C (85°F).
Figure 3 illustrate the life of a lead acid battery that is kept at a float voltage of 2.25V to 2.30V/cell and at a temperature of 20°C to 25°C (60°F to 77°F). After 4 years of operation permanent capacity losses become visible, crossing the 80 percent line. This loss is larger if the battery requires periodic deep discharges. Elevated heat also reduces battery life.
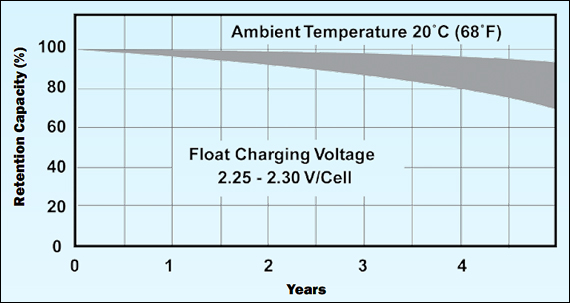
Figure 3: Capacity loss on standby.
Permanent capacity loss can be minimized with operating at a moderate room temperature and a float voltage of 2.25–2.30V/cell.
Source: Power-Sonic
Not all chargers feature float charge and very few road vehicles have this provision. If your charger stays on topping charge and does not drop below 2.30V/cell, remove the charge after 48 hours of charging. Recharge every 6 months while in storage; AGM every 6–12 months.
These described voltage settings apply to flooded cells and batteries with a pressure relief valve of about 34kPa (5psi). Cylindrical sealed lead acid, such as the Hawker Cyclon cell, requires higher voltage settings and the limits should be set to manufacturer’s specifications. Failing to apply the recommended voltage will cause a gradual decrease in capacity due to sulfation. The Hawker Cyclon cell has a pressure relief setting of 345kPa (50psi). This allows some recombination of the gases generated during charge.
Aging batteries pose a challenge when setting the float charge voltage because each cell has its own unique condition. Connected in a string, all cells receive the same charge current and controlling individual cell voltages as each reaches full capacity is almost impossible. Weak cells may go into overcharge while strong cells remain in a starved state. A float current that is too high for the faded cell might sulfate the strong neighbor due to undercharge. Cell-balancing devices are available compensate for the differences in voltages caused by cell imbalance.
Ripple voltage also causes a problem with large stationary batteries. A voltage peak constitutes an overcharge, causing hydrogen evolution, while the valley induces a brief discharge that creates a starved state resulting in electrolyte depletion. Manufacturers limit the ripple on the charge voltage to 5 percent.
Much has been said about pulse charging of lead acid batteries to reduce sulfation. The results are inconclusive and manufacturers as well as service technicians are divided on the benefit. If sulfation could be measured and the right amount of pulsing applied, then the remedy could be beneficial; however giving a cure without knowing the underlying side effects can be harmful to the battery.
Most stationary batteries are kept on float charge and this works reasonably well. Another method is the hysteresis charge that disconnects the float current when the battery goes to standby mode. The battery is essentially put in storage and is only “borrowed” from time to time to apply a topping-charge to replenish lost energy due to self-discharge, or when a load is applied. This mode works well for installations that do not draw a load when on standby.
Lead acid batteries must always be stored in a charged state. A topping charge should be applied every 6 months to prevent the voltage from dropping below 2.05V/cell and causing the battery to sulfate. With AGM, these requirements can be relaxed.
Measuring the open circuit voltage (OCV) while in storage provides a reliable indication as to the state-of-charge of the battery. A cell voltage of 2.10V at room temperature reveals a charge of about 90 percent. Such a battery is in good condition and needs only a brief full charge prior to use.
Observe the storage temperature when measuring the open circuit voltage. A cool battery lowers the voltage slightly and a warm one increases it. Using OCV to estimate state-of-charge works best when the battery has rested for a few hours, because a charge or discharge agitates the battery and distorts the voltage.
Some buyers do not accept shipments of new batteries if the OCV at incoming inspection is below 2.10V per cell. A low voltage suggests a partial charge due to long storage or a high self-discharge caused by a micro-short. Battery users have found that a pack arriving at a lower than specified voltage has a higher failure rate than those with higher voltages. Although in-house service can often bring such batteries to full performance, the time and equipment required adds to operational costs. (Note that the 2.10V/cell acceptance threshold does not apply to all lead acid types equally.)
Under the right temperature and with sufficient charge current, lead acid provides high charge efficiently. The exception is charging at 40°C (104°F) and low current, as Figure 4 demonstrates. In respect of high efficiency, lead acid shares this fine attribute with Li-ion that is closer to 99%.
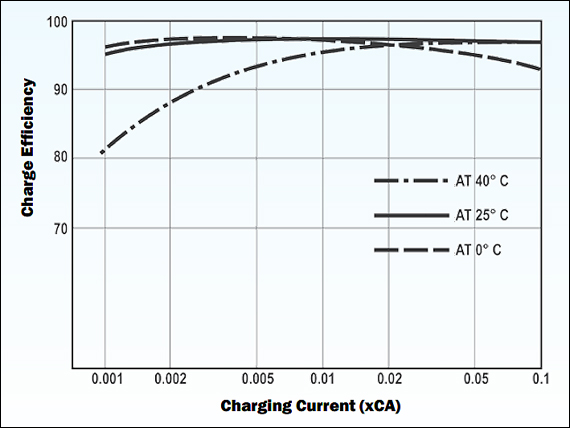
Figure 4: Charge efficiency of the lead acid battery.
At the right temperature and with sufficient charge current, lead acid provides high charge efficiency.
Source: Power-Sonic
These described voltage settings apply to flooded cells and batteries with a pressure relief valve of about 34kPa (5psi). Cylindrical sealed lead acid, such as the Hawker Cyclon cell, requires higher voltage settings and the limits should be set to manufacturer’s specifications. Failing to apply the recommended voltage will cause a gradual decrease in capacity due to sulfation. The Hawker Cyclon cell has a pressure relief setting of 345kPa (50psi). This allows some recombination of the gases generated during charge.
Aging batteries pose a challenge when setting the float charge voltage because each cell has its own unique condition. Connected in a string, all cells receive the same charge current and controlling individual cell voltages as each reaches full capacity is almost impossible. Weak cells may go into overcharge while strong cells remain in a starved state. A float current that is too high for the faded cell might sulfate the strong neighbor due to undercharge. Cell-balancing devices are available compensate for the differences in voltages caused by cell imbalance.
Ripple voltage also causes a problem with large stationary batteries. A voltage peak constitutes an overcharge, causing hydrogen evolution, while the valley induces a brief discharge that creates a starved state resulting in electrolyte depletion. Manufacturers limit the ripple on the charge voltage to 5 percent.
Much has been said about pulse charging of lead acid batteries to reduce sulfation. The results are inconclusive and manufacturers as well as service technicians are divided on the benefit. If sulfation could be measured and the right amount of pulsing applied, then the remedy could be beneficial; however giving a cure without knowing the underlying side effects can be harmful to the battery.
Most stationary batteries are kept on float charge and this works reasonably well. Another method is the hysteresis charge that disconnects the float current when the battery goes to standby mode. The battery is essentially put in storage and is only “borrowed” from time to time to apply a topping-charge to replenish lost energy due to self-discharge, or when a load is applied. This mode works well for installations that do not draw a load when on standby.
Lead acid batteries must always be stored in a charged state. A topping charge should be applied every 6 months to prevent the voltage from dropping below 2.05V/cell and causing the battery to sulfate. With AGM, these requirements can be relaxed.
Measuring the open circuit voltage (OCV) while in storage provides a reliable indication as to the state-of-charge of the battery. A cell voltage of 2.10V at room temperature reveals a charge of about 90 percent. Such a battery is in good condition and needs only a brief full charge prior to use.
Observe the storage temperature when measuring the open circuit voltage. A cool battery lowers the voltage slightly and a warm one increases it. Using OCV to estimate state-of-charge works best when the battery has rested for a few hours, because a charge or discharge agitates the battery and distorts the voltage.
Some buyers do not accept shipments of new batteries if the OCV at incoming inspection is below 2.10V per cell. A low voltage suggests a partial charge due to long storage or a high self-discharge caused by a micro-short. Battery users have found that a pack arriving at a lower than specified voltage has a higher failure rate than those with higher voltages. Although in-house service can often bring such batteries to full performance, the time and equipment required adds to operational costs. (Note that the 2.10V/cell acceptance threshold does not apply to all lead acid types equally.)
Under the right temperature and with sufficient charge current, lead acid provides high charge efficiently. The exception is charging at 40°C (104°F) and low current, as Figure 4 demonstrates. In respect of high efficiency, lead acid shares this fine attribute with Li-ion that is closer to 99%.
Figure 4: Charge efficiency of the lead acid battery.
At the right temperature and with sufficient charge current, lead acid provides high charge efficiency.
Source: Power-Sonic
Watering
Watering is the single most important step in maintaining a flooded lead acid battery; a requirement that is all too often neglected. The frequency of watering depends on usage, charge method and operating temperature. Over-charging also leads to water consumption.
A new battery should be checked every few weeks to estimate the watering requirement. This assures that the top of the plates are never exposed. A naked plate will sustain irreversible damage through oxidation, leading to reduced capacity and lower performance.
If low on electrolyte, immediately fill the battery with distilled or de-ionized water. Tap water may be acceptable in some regions. Do not fill to the correct level before charging as this could cause an overflow during charging. Always top up to the desired level after charging. Never add electrolyte as this would upset the specific gravity and promote corrosion. Watering systems eliminate low electrolyte levels by automatically adding the right amount of water.
A new battery should be checked every few weeks to estimate the watering requirement. This assures that the top of the plates are never exposed. A naked plate will sustain irreversible damage through oxidation, leading to reduced capacity and lower performance.
If low on electrolyte, immediately fill the battery with distilled or de-ionized water. Tap water may be acceptable in some regions. Do not fill to the correct level before charging as this could cause an overflow during charging. Always top up to the desired level after charging. Never add electrolyte as this would upset the specific gravity and promote corrosion. Watering systems eliminate low electrolyte levels by automatically adding the right amount of water.
Simple Guidelines for Charging Lead Acid Batteries
- Charge in a well-ventilated area. Hydrogen gas generated during charging is explosive.
- Choose the appropriate charge program for flooded, gel and AGM batteries. Check manufacturer’s specifications on recommended voltage thresholds.
- Recharge lead acid batteries after each use to prevent sulfation. Do not store on low charge.
- The plates of flooded batteries must always be fully submerged in electrolyte. Fill the battery with distilled or de-ionized water to cover the plates if low. Never add electrolyte.
- Fill water level to designated level after charging. Overfilling when the battery is on low charge can cause acid spillage during charging.
- The formation of gas bubbles in a flooded lead acid indicates that the battery is reaching full state-of-charge. (Hydrogen appears on negative plate and oxygen on positive plate).
- • Lower the float charge voltage if the ambient temperature is higher than 29°C (85°F)..
- Do not allow a lead acid to freeze. An empty battery freezes sooner than one that is fully charged. Never charge a frozen battery.
- Avoid charging at temperatures above 49°C (120°F).
XXX . XXX 4 zero null 0 1
Alternator (automotive)
Alternator Cutout

Alternators are used in modern automobiles to charge the battery and to power the electrical system when its engine is running.
Until the 1960s, automobiles used DC dynamo generators with commutators. With the availability of affordable silicon diode rectifiers, alternators were used instead. This was encouraged by the increasing electrical power required for cars in this period, with increasing loads from larger headlamps, electric wipers, heated rear windows and other accessories.

The modern type of vehicle alternators were first used by the military from WWII, to power radio equipment on specialist vehicles.[i] Post-war, other vehicles with high electrical demands, such as ambulances and radio taxis, could also be fitted with optional alternators.[1]
Alternators were first introduced as standard equipment on a production car by the Chrysler Corporation on the Valiant in 1960, several years ahead of Ford and General Motors.
Magnetos in early automobiles
Some early automobiles, like the Ford Model T, used a different sort of alternator system: an engine-driven magneto which generated low-voltage alternating current that was supplied to trembler coils, which provided the high voltage needed to generate ignition sparks. (This was different from a true ignition magneto, which generates high voltage directly.) Since such a magneto system only depended on the engine's motion to generate current, it could even be used when starting a manually cranked engine, provided the crank was pulled sharply, so that the magneto would produce enough current for the coils to make good sparks.
The Model T incorporated its magneto into the engine flywheel. The first Model Ts used the magneto solely for the trembler coil ignition. Beginning with the 1915 model year, Ford added electric headlights, also powered by the magneto.[3][4] The magneto circuit was strictly AC, with no battery included. (There was a switch on the ignition coils to use a battery instead, which could be helpful when starting in cold weather, but Ford neither provided a battery nor did it encourage the use of one before it introduced an electric starter in 1919. The owner would have to install the battery himself and charge it externally.)
Starting in the 1919 model year, Ford upgraded the Model T to include an electric starter, which was standard for some models and optional for others. This starter installation also included a battery, charged by a conventional dynamo, and the lights were now powered by the battery. However, the flywheel magneto still powered the ignition, and since models without the starter had no battery, they continued to use magneto-powered lights.
Advantages over dynamos
Alternators have several advantages over direct-current generators. They are lighter, cheaper and more rugged. They use slip rings providing greatly extended brush life over a commutator. The brushes in an alternator carry only excitation current, a small fraction of the current carried by the brushes of a DC generator, which carry the generator's entire output. A set of rectifiers (diode bridge) is required to convert AC to DC. To provide direct current with low ripple, a three-phase winding is used and the pole-pieces of the rotor are shaped (claw-pole). Automotive alternators are usually belt-driven at 2–3 times crankshaft speed. The alternator runs at various RPM (which varies the frequency) since it is driven by the engine. This is not a problem because the alternating current is rectified to direct current.
Operation

Despite their names, both 'DC generators' (or 'dynamos') and 'alternators' initially produce alternating current. In a so-called 'DC generator', this AC current is generated in the rotating armature, and then converted to DC by the commutator and brushes. In an 'alternator', the AC current is generated in the stationary stator, and then is converted to DC by the rectifiers (diodes).
Typical passenger vehicle and light truck alternators use Lundell or 'claw-pole' field construction. This uses a shaped iron core on the rotor to produce a multi-pole field from a single coil winding. The poles of the rotor look like fingers of two hands interlocked with each other. The coil is mounted axially inside this and field current is supplied by slip rings and carbon brushes. These alternators have their field and stator windings cooled by axial airflow, produced by an external fan attached to the drive belt pulley.[7]

Modern vehicles now use the compact alternator layout. This is electrically and magnetically similar, but has improved air cooling. Better cooling permits more power from a smaller machine. The casing has distinctive radial vent slots at each end and now encloses the fan. Two fans are used, one at each end, and the airflow is semi-radial, entering axially and leaving radially outwards.[8] The stator windings now consist of a dense central band where the iron core and copper windings are tightly packed, and end bands where the windings are more exposed for better heat transfer. The closer core spacing from the rotor improves magnetic efficiency. The smaller, enclosed fans produce less noise, particularly at higher machine speeds.[8]
Larger vehicles may have salient pole alternators similar to larger machines.[9]
The windings of a 3 phase alternator may be connected using either the Delta or Star (Wye) connection regime set-up.[10]
Brushless versions of these type alternators are also common in larger machinery such as highway trucks and earthmoving machinery. With two oversized shaft bearings as the only wearing parts, these can provide extremely long and reliable service, even exceeding the engine overhaul intervals.
Field regulation
Automotive alternators require a voltage regulator which operates by modulating the small field current to produce a constant voltage at the battery terminals. Early designs (c.1960s–1970s) used a discrete device mounted elsewhere in the vehicle. Intermediate designs (c.1970s–1990s) incorporated the voltage regulator into the alternator housing. Modern designs do away with the voltage regulator altogether; voltage regulation is now a function of the electronic control unit (ECU). The field current is much smaller than the output current of the alternator; for example, a 70 A alternator may need only 7 A of field current. The field current is supplied to the rotor windings by slip rings. The low current and relatively smooth slip rings ensure greater reliability and longer life than that obtained by a DC generator with its commutator and higher current being passed through its brushes.
The field windings are supplied with power from the battery via the ignition switch and regulator. A parallel circuit supplies the "charge" warning indicator and is earthed via the regulator (which is why the indicator is on when the ignition is on but the engine is not running). Once the engine is running and the alternator is generating power, a diode feeds the field current from the alternator main output equalizing the voltage across the warning indicator which goes off. The wire supplying the field current is often referred to as the "exciter" wire. The drawback of this arrangement is that if the warning lamp burns out or the "exciter" wire is disconnected, no current reaches the field windings and the alternator will not generate power. Some warning indicator circuits are equipped with a resistor in parallel with the lamp that permit excitation current to flow if the warning lamp burns out. The driver should check that the warning indicator is on when the engine is stopped; otherwise, there might not be any indication of a failure of the belt which may also drive the cooling water pump. Some alternators will self-excite when the engine reaches a certain speed.
In recent years,[when?] alternator regulators are linked to the vehicle's computer system and various factors including air temperature obtained from the intake air temperature sensor, battery temperature sensor and engine load are evaluated in adjusting the voltage supplied by the alternator.
Output Current
Older automobiles with minimal lighting may have had an alternator capable of producing only 30 Amps. Typical passenger car and light truck alternators are rated around 50–70 A, though higher ratings are becoming more common, especially as there is more load on the vehicle's electrical system with air conditioning, electric power steering and other electrical systems. Very large alternators used on buses, heavy equipment or emergency vehicles may produce 300 A. Semi-trucks usually have alternators which output 140 A. Very large alternators may be water-cooled or oil-cooled.
Efficiency
Efficiency of automotive alternators is limited by fan cooling loss, bearing loss, iron loss, copper loss, and the voltage drop in the diode bridges. Efficiency reduces dramatically at high speeds mainly due to fan resistance. At medium speeds efficiency of today's alternators is 70-80%.[11] This betters very small high-performance permanent magnet alternators, such as those used for bicycle lighting systems, which achieve an efficiency around 60%. Larger permanent magnet electric machines (that can operate as motors or alternators) can achieve today much higher efficiencies. Pellegrino et al.,[12] for instance, propose not particularly expensive designs that show ample regions in which efficiency is above 96%. Large AC generators used in power stations run at carefully controlled speeds and have no constraints on size or weight. They have very high efficiencies as high as 98%.
Hybrid vehicles
Hybrid automobiles replace the separate alternator and starter motor with one or more combined motor/generator(s) (M/Gs) that start the internal combustion engine, provide some or all of the mechanical power to the wheels, and charge a large storage
XXX . XXX 4 zero null 0 1 2
Electronic control unit
In automotive electronics, Electronic Control Unit (ECU) is any embedded system that controls one or more of the electrical system or subsystems in a transport vehicle.
Types of ECU include Electronic/engine Control Module (ECM), Powertrain Control Module (PCM), Transmission Control Module (TCM), Brake Control Module (BCM or EBCM), Central Control Module (CCM), Central Timing Module (CTM), General Electronic Module (GEM), Body Control Module (BCM), Suspension Control Module (SCM), control unit, or control module. Taken together, these systems are sometimes referred to as the car's computer (Technically there is no single computer but multiple ones.) Sometimes one assembly incorporates several of the individual control modules (PCM is often both engine and transmission).[1]
Some modern motor vehicles have up to 80 ECUs. Embedded software in ECUs continues to increase in line count, complexity, and sophistication.[2] Managing the increasing complexity and number of ECUs in a vehicle has become a key challenge for original equipment manufacturers (OEMs). Examples of such ECUs include:
- Door control unit (DCU)
- Engine control unit (ECU) — not to be confused with electronic control unit, the generic term for all these devices
- Electric Power Steering Control Unit (PSCU) — Generally this will be integrated into the EPS powerpack.
- Human-machine interface (HMI)
- Powertrain control module (PCM): Sometimes the functions of the Engine Control Unit and transmission control unit (TCU) are combined into a single unit called the Powertrain Control Module.
- Seat Control Unit
- Speed control unit (SCU)
- Telematic control unit (TCU)
- Transmission control unit (TCU)
- Brake Control Module (BCM; ABS or ESC)
- Battery management system (BMS)

An ECU from a Geo Storm.
Key elements of an ECU
- Core
- Memory
- Inputs
- Supply Voltage
- Digital inputs
- Analog inputs
- Outputs
- Relay drivers
- H bridge drivers
- Injector drivers
- Logic outputs
- Communication links
- Housing
Design and development
The development of an ECU involves both hardware and software required to perform the functions expected from that particular module. Automotive ECU's are being developed following the V-model.[1] Recently the trend is to dedicate a significant amount of time and effort to develop safe modules by following standards like ISO 26262.[3] It is rare that a module is developed fully from scratch. The design is generally iterative and improvements are made to both the hardware and software. The development of most ECU's are carried out by Tier 1 suppliers based on specifications provided by the OEM.
Testing and validation
As part of the development cycle, manufacturers perform detailed FMEAs and other failure analyses to catch failure modes that can lead to unsafe conditions or driver annoyance. Extensive testing and validation activities are carried out as part of the Production part approval process to gain confidence of the hardware and software. On-board diagnostics or OBD help provide specific data related to which system or component failed or caused a failure during run time and help perform repairs.
Tuning
Some people are eager to modify their ECU so as to be able to add more functionality to it. Most ECU's these days however come equipped with protection locks which prevent users of modifying the ECU. The protection locks are made in a way that, when circumvented, triggers DMCA liability. This in effect makes modifying the ECU by circumventing the protection illegal
XXX . XXX zero null 0 1 2 3
Automatic Performance Control
Automatic Performance Control (APC) was the first engine knock and boost control system that was introduced on turbo charged Saab H engines in 1982 and was fitted to all subsequent 900 Turbos through 1993 (and 1994 convertibles), as well as 9000 Turbos through 1989.
Sold to Maserati to equip the Carburated MAserati Biturbo, same layout as the APC from SAAB with different settings, known as MABC , Maserati Automatic Boost Controler

The APC allowed a higher compression ratio (initially, 8.5:1 as opposed to 7.2:1, and, on 16-valve variants introduced in 1985, 9.0:1). This improved fuel economy and allowed the use of low-octane petrol without causing engine damage caused by knock.
The APC serves two purposes: it controls boost pressure and the overall performance through the water filter and other various motor pumps - specifically, the rate of rise and maximum boost level - and it detects and manages harmful knock events.
To control the turbocharger, the APC monitors the engine's RPM and inlet manifold pressure via a pressure transducer, and uses these inputs to control a solenoid valve that trims the rate of rise of pressure as well as the maximum pressure by directing boost pressure to the turbocharger's pneumatic wastegate actuator.
To detect knock, a piezoelectric knock sensor (basically a microphone) bolted to the engine block responds to unique frequencies caused by engine knock. The sensor generates a small voltage that is sent to the electronic control unit, which processes the signal to determine if, in fact, knock is occurring. If it is, then the control unit activates a solenoid valve that directs boost pressure to the turbocharger's pneumatically controlled wastegate actuator, which opens the wastegate to bypass exhaust gases from the turbocharger directly to the exhaust pipe, lowering turbo boost pressure until the knock subsides. Knock events that are managed by the APC can be "seen" when the in-dash boost needle "twitches" slightly. The APC unit has a 'knock' output where an LED may be connected. This LED will then light up if knock is detected. The pictured APC gauge has this custom LED fitted at the end of the red scale. Because the knock sensor becomes less accurate at high revolutions, the APC tapers maximum boost pressure after approximately 4,500 RPM.
APC boost gauge[edit]

Saab Full Pressure Turbo (FPT) models with this unit include the APC name displayed on a non-numeric boost pressure gauge in the instrument panel. Although knock sensors are common even on non-turbocharged and turbocharged engines today, Saab has continued to use the APC name prominently as a differentiating feature.
The white area on the left side of the scale shows manifold vacuum under normal driving conditions, the short white dash is atmospheric pressure (engine off), the orange scale is where there is safe turbo boost, the red scale is boost above 0.5 - 0.7 bar where the wastegate may be opened or a fuel cut due to knocking may occur.
Saab integrated the APC's boost control functionality with ignition control in 1990 with the introduction of the DI/APC system, available in 9000 models only. The DI/APC system managed knock not only by decreasing boost via a solenoid but by retarding ignition timing as well; DI/APC also managed the engine's basic ignition timing.
XXX . XXX 4 zero null 0 1 2 3 4
Designing a micro controller-driven alternator voltage regulator
Remember the days when, if your car’s alternator died, you could hit the regulator with a hammer and get it working again? Those were the days. Back then the regulator was a steel box mounted on the fender well. Inside, was a normally closed contact that opened up when the battery voltage exceeded some predetermined level. It was a simple circuit containing a few electronic components and a relay. As the relay wore out occasionally the contacts would not connect. You could whack the thing and jar the contacts just enough to get it working again. This was an easy fix and an early warning at the same time. You knew the alternator voltage regulator would stop working again so you would replace it at your earliest convenience (for me, when I could afford it). This was a simple system that worked for many years. Why, then, do we need a microcontroller?
Why take an alternator voltage regulator from the simplicity of a relay and a few parts to something with more computing power than NASA had on the first Apollo moon shot? The answer lies with the potential for extended battery life, improved gas mileage, lower emissions, stability at lower engine idles, and most importantly, flexibility.
Many low-volume charging-system applications beg for features but are stuck with what everyone else is using. For the OEMs that make these devices, microcontrolled regulators enable them to first prototype a potential customer’s configuration quickly and then provide low-volume products without enormous tooling charges.
A more universal principle is in play as well. It seems that nothing conceived by mankind remains simple for long. If man can make it, man can make it more complicated--all under the guise of “we can make it better.” In this case, alternator voltage regulation is no exception.
A microprocessor-based alternator voltage regulator seems, at first glance, to be a simple project to complete. After all, anything done with a relay can’t be all that taxing on a microcontroller. Well, sometimes ignorance is bliss. The smarter the controller, the more difficult it becomes to keep the alternator voltage regulator stable.
An alternator, such as the one shown in Figure 1, is a current-mode machine. You put a current in and, with some help from a mechanical input (a pulley), you get a gained current out. But, you say, isn’t this an alternator voltage regulator? Yes, and this is where the problems begin. To control the output of a current-mode machine by looking at its voltage, knowing that the loads can vary in type (or phase) and amplitude at any time, is quite a challenge.
Figure 1: Visteon alternator in a Ford Taurus

The advantage of the old relay-driven system was that it was slow. Its poor response time and built-in hysteresis allowed for some voltage variation with load but kept the system fairly stable regardless of load.
Quick review
The input to a charging system is both mechanical and electrical. The mechanical part is the pulley that rotates the field (or the rotor in Figure 2) inside the stator, and the electrical part is the field current. The rotation generates the current “gain” in the system. Without rotation, there is no output current.
The input to a charging system is both mechanical and electrical. The mechanical part is the pulley that rotates the field (or the rotor in Figure 2) inside the stator, and the electrical part is the field current. The rotation generates the current “gain” in the system. Without rotation, there is no output current.
Figure 2: Cutaway of Delphi alternator

The output of the charging system is a product of rectifying the stator current, as shown in Figure 3. The rotating magnetic field inside the stator winding generates a sinusoidal waveform. This waveform is rectified to provide a direct current, which is a function of the input, or field current, and the field rotation. Since we want to regulate an output voltage, not a current, the load is involved in the regulation algorithm. As a result, stability is based on the response time of the alternator as well as the reaction time of the load it drives. In the end, the charging-system regulation loop now includes all of the vehicle electronics, not just the alternator and its mechanical inputs.
Figure 3: Electrical diagram of an alternator

With electronic controls automotive engineers can add neat features beyond simple output-voltage regulation. Remember man’s quest for complexity? Once the engineers decide to use a microcontroller-based system, these added features can help justify the added cost. The bonus features include field duty-cycle slew-rate limiting, soft start, auto start, and serial communications with the engine controller. With serial communications, engineers can also include higher level diagnostics such as no rotation, faulted rectifier-diode detection, as well as shorted or open field windings.
Ensuring system stability
Before the design engineer can start adding on all the glitter that makes a microcontrolled system cost effective, the charging system must be stable at regulating the output voltage. So, the first algorithm of any importance is the regulation algorithm. Regulation consists of sensing the battery voltage with adequate filtering to remove unwanted information and then responding with an appropriate current level for the field.
Before the design engineer can start adding on all the glitter that makes a microcontrolled system cost effective, the charging system must be stable at regulating the output voltage. So, the first algorithm of any importance is the regulation algorithm. Regulation consists of sensing the battery voltage with adequate filtering to remove unwanted information and then responding with an appropriate current level for the field.
Sensing and filtering
The output-voltage waveform of an alternator is not so flat. Figure 4 shows that the rectified sinusoidal waveform has a ripple voltage or ripple current associated with it. This ripple can be quite large, even when we include the 1F capacitance of the battery. The peak-to-peak ripple voltage out of an alternator can be as much as 4 to 6V at high output currents.
The output-voltage waveform of an alternator is not so flat. Figure 4 shows that the rectified sinusoidal waveform has a ripple voltage or ripple current associated with it. This ripple can be quite large, even when we include the 1F capacitance of the battery. The peak-to-peak ripple voltage out of an alternator can be as much as 4 to 6V at high output currents.
Figure 4: Alternator voltages at 100A output and 6,000RPM

This peak-to-peak ripple voltage can be overcome without large filters by synchronously sampling the output voltage with a phase signal. The ripple is periodic with the phase, so this technique is quite effective. We can effectively filter out most of the periodic noise generated by the stator phasing. That noise is over 90% of what needs to be filtered out, with most of it in the lower frequency range.
Filtering of higher frequencies can be done by placing some simple RC networks in front of the analog-to-digital (A/D) converter. You have to do some level shifting anyway to bring the battery setpoint voltage of about 14.5V to below the 5V level of most A/D converters. We can do further filtering in software by a rolling average of the sensed voltage. A four- to eight-sample averaging seems to work well.
Those who are familiar with system dynamics can also understand that system poles and zeros can shift depending on load, load type, engine RPM (gain), and regulation setpoint. With that little bit of information, we realize that our regulation must have a very low-frequency dominant pole (less than 50Hz) and produce a fairly low–unity-gain bandwidth (less than 3kHz) to keep things from getting out of hand. The more time we take to decide on what to respond to, the lower that pole becomes. Also, the speed at which we react to a step change in output voltage determines our unity-gain bandwidth. This brings me to the next topic.
Responding
Response comes in the form of providing an appropriate field current to maintain regulation. The field current is typically regulated by driving a transistor switch at a duty cycle to attain a desired current, as shown in Figure 3. This technique is called voltage control of the field-current input. (Seems appropriate, don’t you think? After all, you’re regulating a current-mode machine by looking at its voltage.) The two generally accepted ways of regulating the alternator are through a fixed-frequency duty cycle or a variable-frequency duty cycle.
Response comes in the form of providing an appropriate field current to maintain regulation. The field current is typically regulated by driving a transistor switch at a duty cycle to attain a desired current, as shown in Figure 3. This technique is called voltage control of the field-current input. (Seems appropriate, don’t you think? After all, you’re regulating a current-mode machine by looking at its voltage.) The two generally accepted ways of regulating the alternator are through a fixed-frequency duty cycle or a variable-frequency duty cycle.
The variable-frequency systems are dependent on the load and the response time of the system (alternator and loads). They tend to be high-gain systems. As a result they tend to be more accurate in maintaining a fixed setpoint voltage at the output while having inherent instability problems.
Variable-frequency systems work by the old standard-relay method: turn on the field current when the output voltage is below a setpoint and turn it off when the setpoint is exceeded. The hope is that the system is so dynamic that it only stays in one point for a moment. Thus if the system finds an unstable point, it would only operate there for a moment, and the battery would help mask those brief, infrequent moments.
The fixed-frequency systems are more stable in both input waveform and output control. These systems tend to use a lower-gain system allowing the setpoint voltage to vary by as much as 200 to 300mV over the load range.
Fixed-frequency systems are easier to manipulate if you want to do other things like soft-start or load-response control. They are less dependent on the load dynamics and quite a bit more stable than the variable-frequency method.
A few hundred millivolts compared with a 6V ripple is not very much. So the difference between the variable-frequency and fixed-frequency system is not critical, at least to my way of thinking. However, some engineers feel that a few hundred millivolts can make a significant difference in battery longevity. I’m not so convinced.
To summarize, with the variable-frequency method, the decision to turn on or off the field driver is made with each sample. With the fixed-frequency method, the duty cycle is determined by where in the setpoint window the sample is, as shown in Figure 5.
Figure 5: Setpoint band for determining field duty cycle. (The setpoint is typically around 14.5V at 25C.)

I have worked with both systems and find that fixed-frequency systems are much more stable and predictable—especially when considering the extended feature set made possible with a microcontroller.
Regulation band
Let’s go into a design of a simple microcontrolled system in detail. Figure 6 shows a basic block diagram for a microcontroller-based alternator voltage regulator. Since the fixed-frequency system is much more stable and easier to work with, we’ll focus on this approach.
Let’s go into a design of a simple microcontrolled system in detail. Figure 6 shows a basic block diagram for a microcontroller-based alternator voltage regulator. Since the fixed-frequency system is much more stable and easier to work with, we’ll focus on this approach.
Figure 6: Basic block diagram of an alternator voltage regulator

The fixed-frequency method has a regulation band as shown in Figure 5. Within the regulation band, a specific duty cycle is associated with a specific voltage. At the low end of the band, the duty cycle is the highest. This point corresponds to the highest loading on the system. At the high end of the band, the duty cycle is the lowest, which corresponds to the lightest load the system can tolerate.
We want to make this band as narrow as possible without making the system unstable. As you can imagine, when the window is narrowed, the gain increases. With higher gain, we have trouble keeping the low-frequency dominant pole or the low-frequency–gain bandwidth product. Typical systems on the market today that use this method have around a 200 to 300mV range from full field to no field current.
We can’t possibly look directly at 14.5V with a micro A/D converter, and simply dividing this voltage down loses a lot of information as well. A 200mV window divided by four ends up with a 50mV spread to convert with the A/D converter. A 5V, 10-bit A/D converter gives 4.88mV per bit. This means I have a resolution of only 10 to 11 steps for regulation if I divide by four.
This leaves us with building an offset amplifier with an accompanying gain stage as shown in Figure 7. The offset amplifier centers the setpoint to the middle of the A/D converter’s sensing voltage range. The gain amplifier then gains that up to get as much out of the A/D conversion as possible and still stay within the boundaries of the range of voltages we need to regulate.
Figure 7: Possible gain and offset amplifier circuit

With the proper biasing, the input is 14.5V +/-100mV and the output is something reasonable for the A/D converter to read. Biasing is a hardware issue, so we’ll let the hardware guys worry about that.
The second issue with the regulation setpoint is temperature compensation. The battery’s ability to accept a charge is dependent on ambient temperature. At -40C a typical car battery can be charged to as much as 16V whereas at 125C, the charging voltage has to be much lower to keep the battery from boiling over. The temperature-compensation curve is totally dependent on what is best for battery life. Figure 8 shows a typical temperature compensation curve for some cars on the road today.
Figure 8: Typical temperature compensation curve

Oddly enough, temperature-compensation curves vary from car manufacturer to car manufacturer even though the battery technology does not change from car to car. Flexibility is one of the advantages of making a complex alternator voltage regulator, right?
With the proper input offset and a total gain of two, the input to the A/D converter is 0.5V to 4.5V. With a gain of two, the 200mV band is now 400mV to the A/D converter. Using the aforementioned 4.88mV per bit at the A/D converter translates to an actual 2.4mV per step measured, or 81 steps over the 200mV window. With some averaging, this can easily be bumped up to 128 steps or 7 bits of resolution. This level of resolution is plenty for what we need.
Now we’re ready to convert data. We sample synchronously with one of the phases to minimize noise issues. We may be sampling every time the phase is switched, but we only use the last sample that happened just prior to the field driver turning off. From that, an average is taken over a continuously running sample of four to six samples. The frequency of the alternator phase can be in the kilohertz range, while the field duty-cycle frequency is typically between 100 and 400Hz. Again, slow is good. The lower the field duty-cycle frequency, the lower the electromagnetic interference and the lower the power loss due to switching. Some regulators today work at less than 100Hz.
The running average value is then compared with the values in a table that corresponds to the temperature compensation your customer wants.
Field duty-cycle slew rate
Quite often, the load variation drops outside of the regulation window. When this happens, the field duty cycle is commanded to go to 100% from wherever it was. Instant 100% duty-cycle moments can cause stability issues in the engine at idle.
Quite often, the load variation drops outside of the regulation window. When this happens, the field duty cycle is commanded to go to 100% from wherever it was. Instant 100% duty-cycle moments can cause stability issues in the engine at idle.
One feature that makes the microcontroller desirable is the ability to “feather in” electric loads into the mechanical system. Essentially, this technique limits the slew rate on the field-current duty cycle. This limiting allows for lower engine idling, which affects gas mileage and emissions. The flowcharts in Figure 9 show this as RATE(up/dn).
Figure 9: Phase interrupt and regulation loop routines

The duty cycle is increased at a fixed slow rate at step increases in load. This rate is so slow, that some systems today can take as much as 10 seconds to go from 0% duty cycle to full field. Others can take around 2s to get to full field. The longer it takes, the longer the battery must hold things up until the alternator catches up. One way in which you can see this delay is by the momentary dimming of headlights every time the AC kicks in.
A duty-cycle slew-rate generator is based on a simple timed counter that looks at the measured setpoint results and counts up or down. Instead of the setpoint band directly setting the duty cycle, a duty-cycle register that’s influenced by the setpoint results is used. The final value of the register should be the measured setpoint band value. Whatever is in this register is what is used to generate the duty cycle seen at the field driver.
For example, say the loading was such that the duty cycle was 50%. This would be right in the center of the setpoint band as shown in Figure 8. A step increase in load occurs requiring an increase of the duty cycle to 75%. Without slew-rate control, the duty cycle would change to 75% on the next period causing a step increase in mechanical load as well. With slew-rate control, the duty cycle would increase at a fixed rate until the system was satisfied, e.g. the measured value matched the duty cycle register value. At a 2 sec overall slew rate, a 25% increase in duty cycle would take a half a second to realize.
There are some issues with over-voltage such that we cannot count down as slowly as we would want to count up. The battery is more willing to go higher in voltage than it is to dip under load. Also, over-voltage conditions are frowned upon. As a result, the algorithm in Figure 9 bypasses the field duty-cycle register altogether when the measured voltage is above the setpoint band (~100mV above setpoint). I do not set the duty cycle register to zero; instead, I turn off the field and let the duty-cycle register count down until the over-voltage condition has passed.
With a duty-cycle slew-rate limiter, we are now slowing down the response of the alternator to step increases in load, thereby stabilizing the system. Effectively, we are over-damping the system to keep it more stable, while not allowing over-voltage conditions to occur.
The main loop
For me, the main loop as shown in Figure 10 is basically a housekeeper and a watchdog of sorts. Everything of interest to me is run by interrupts, so the main loop is what the micro does when it has nothing else to do.
For me, the main loop as shown in Figure 10 is basically a housekeeper and a watchdog of sorts. Everything of interest to me is run by interrupts, so the main loop is what the micro does when it has nothing else to do.
Figure 10: Main routine

The main loop checks for loose ends, such as what the ambient temperature is, if the phase input is really working, and if the alternator has lost all ability to charge the battery. Since we use the phase input to look at the output voltage, if we lose phase, we have to generate an artificial interrupt. That sort of thing.
Dilbert cartoonist Scott Adams labeled the first week of a project the Wally Period. Wally explains that “most tasks become unnecessary within seven days.” In the case of our alternator, most faults go away within one second. So, I put a delay of 1s in reporting a fault. Anything less than a second is not of concern, so we can ignore faults for the alternator’s Wally Period.
Once we add serial communications, we can remove the lamp driver in place of high-level diagnostics. We can also add the ability to change the setpoint by commands from the engine controller. This capability is added today in many vehicles. Instead of looking at the positive temperature-controlled resistor for temperature information, the engine controller sends a signal requesting a specific setpoint band. Some engine controllers include temperature compensation, while others do not.
Most systems today require more communication to the regulator than from it. There are opportunities for PWM (pulse width modulation) communications (where the PWM duty cycle commands the setpoint value), LIN (local interconnect network) bus communications, “bit serial interface” communications as well as CAN (controller area network) communications protocols.
Waking up the alternator
When the ignition is turned on, the conditions of the regulator are fairly specific. At start up, ignition occurs with no phase voltage, and the setpoint has not been reached. The battery-rest voltage is always below the setpoint. With this condition present, the regulator knows that the system is waiting to start up.
When the ignition is turned on, the conditions of the regulator are fairly specific. At start up, ignition occurs with no phase voltage, and the setpoint has not been reached. The battery-rest voltage is always below the setpoint. With this condition present, the regulator knows that the system is waiting to start up.
At this point, the regulator provides a lower duty cycle, between 10% and 25%, to determine if the rotor is spinning without drawing too much current. Small amounts of current in a spinning rotor can generate enough voltage on the stator to be easily read by a microcontroller. The rotor is only spinning if the engine is running. Once a proper phase voltage/frequency is sensed, the regulator can begin normal regulation.
Soft start at wakeup essentially consists of slew-rate limiting the field duty cycle once the regulator has recognized that the system is starting up. We do this to prevent the engine from stalling due to an alternator loading before the engine-idle control system has had a chance to stabilize. Some engineers just delay initiating the regulator for several seconds as the engine stabilizes. Either way it works.
Auto start is another way of waking up the regulator assembly without using the ignition input. If the ignition-input connection is broken or disconnected, you can use a phase input to look for activity. Typically there is some residual magnetism in the rotor, such that if the engine is running, the stator will exhibit some low-level voltage. This voltage is typically a few hundred millivolts at a few thousand RPM in the alternator. This voltage can be detected by using additional circuitry (such as op-amps) between the stator and the microcontroller. Without the auto-start feature, the phase input can be a simple resistor divider coupled with a zener clamp and capacitor. These low voltages typically found on the sensed phase when the field is not excited require some amplification to be detected by a micro controller.
Let me say a little about a hardware watchdog. In an embedded microcontroller system, the ambient temperatures can sometimes get out of hand. With that said, we may not know how the microcontroller will operate at such temperatures. A software watchdog or internal watchdog cannot be counted on under these adverse conditions. It’s kind of like putting the fox in charge of the hen house. Instead, I use a voltage regulator that has a built-in watchdog as shown in Figure 10. In the main routine, I toggle a bit that goes to the watchdog. The watchdog looks for transitions. If it stops seeing transitions, it resets the micro and we start all over.
The beauty of electronics
Today, electronics eliminates the option to make a regulator work just by hitting it. Of course, electronics also eliminates the need to do so. Even the aftermarket versions of those old regulators are fully electronic today. One of the not-so-hidden benefits of electronics is that, even with all their complexity, they’re immensely more reliable than the mechanical systems they replaced.
Today, electronics eliminates the option to make a regulator work just by hitting it. Of course, electronics also eliminates the need to do so. Even the aftermarket versions of those old regulators are fully electronic today. One of the not-so-hidden benefits of electronics is that, even with all their complexity, they’re immensely more reliable than the mechanical systems they replaced.
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
GATE OUT / IN EFFICIENCY AUTO ELECTRONIC
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++