series of electronics drone technology until in Electronics, Robotics and Drone Technology (ElRoDr) AMNIMARJESLOW GOVERNMENT 91220017 LOR Mc MADDOG DRONE ELECTRONIC EL TECH 02096010014 ELWar on ELECTRONIC WARFARE LJBUSAF TO XWAM AND XAM $$$$$$$$$$ GROW UP BULLET CONNEXXX GROUP LOOP NOLESS FUNCTION THANKYU ME < > YOU $$$$$$$$$$$$$$$$$
The dawn of counter-drone technologies
One of the most frequently heard terms in the military and commercials worlds today is "disruptive technology" - something that so significantly changes the way things are done that entire industries and practices disappear as new ones arise. Small, cheap unmanned aerial vehicles (UAVs), easily available to anyone anywhere, are a major example of a disruptive technology.
While the U.S. military has dominated 21st century battle spaces with capable, sometimes armed, UAVs, nearly every nation and military on Earth is acquiring UAVs or building their own. That has led to the need for a counter-UAV (C-UAV) capability to defend U.S. and allied forces and critical infrastructure from enemy UAV surveillance, electronic warfare, and conventional attack.
Surveillance and weapon unmanned aircraft are a growing threat to commercial infrastructure and heavy industry such as oil refineries, nuclear power plants, and airports.
Today's commercially available UAVs can carry surveillance cameras or a brick of powerful explosives. These miniature unmanned aircraft also are available to almost anyone over the Internet. This not only has created another level of threat for the military, but also has expanded the danger to power plants, sports arenas, ships, railroads, and pipelines.
While most small UAVs are operated legally, the threat from "bad actors" flying similar UAVs in the same airspace grows exponentially. This is creating a wide range of new industries, from legal practices specializing in UAV-based lawsuits or criminal charges to manufacturing and maintenance companies to a new generation of specialized small sensors to C-UAV systems. [Native Advertisement]
Counter-UAV technologies are much like the armor/anti-armor developments prevalent in the last century: Build a stronger armor and someone will build a new way to pierce it. Build a better C-UAV capability and someone will create a new counter-C-UAV.
"All these C-UAV capabilities will lead to counter-counter - how do you make the drone unhackable. So it's a UAV/C-UAV arms race," says Michael Blades, senior aerospace and defense industry analyst at Frost & Sullivan in San Antonio, Texas.
Counter-drone cat-and-mouse
"While all these C-UAV companies are competing for this market, many are looking at a broad appeal that includes commercial requirements," Blades continues. "That has led to a search for synergies with other companies. Those same companies also are looking at hardening drones, something DARPA also is working on."
C-UAV is still in its infancy and many companies - large, small, and start-ups - only recently have begun looking at it as a prospective future high-growth market .
The Hitachi Visualization Suite (HVS) can correlate disparate data to cover everything from a college campus to very covert missions.
As with many others, experts at Hitachi Data Systems Federal in Reston, Va., began identifying the need about two years ago. A combination of in-house development and some technology acquisitions led to the marketing, about six months later, of the Hitachi Visualization Suite (HVS), which now has about two dozen active users
"Within a geospatial format, with HVS you can see how disparate data correlates, not only geospatial but also time continuum. That covers everything from a college campus to very covert missions where you need to get real-time information out to the front line," explains Chris Jensen, director of HDS federal critical infrastructure, intelligence & investigative solutions at Hitachi Federal. "On the federal side, we added specific capabilities. We have our own design and development team to help us meet the need of a specific segment of the market."
He breaks down Hitachi's market segment into three parts: critical infrastructure, or anything from a sports stadium to a nuclear power plant; intelligence, or how to bring in information and create actionable intelligence out of it, then get that out to the end user; and investigative, or complex situations, such as conspiracies within the homeland or identifying and tracking terrorist cells internationally.
As with most high-tech areas today, the military is keeping a close watch on companies developing commercial products that the military could adapt for defense applications. Civilian markets also are benefitting from military developments, resulting in a complex and sometimes-contentious synergy.
"A lot of focus on the commercial side is being able to see the link between drone and operator and follow it back so the operator can be caught. It might not have been a malicious thing, but how do you know until you find the operator? So the commercial focus is detect and alert, then integrate into existing systems [for mitigation]," Blades says.
The Sensofusion AIRFENCE system offers a smartphone app to warn users of drone intrusions around sensitive perimeters.
Countering drone swarms
"On the military side, a lot of top Army and Marine Corps brass are concerned about the potential for small, weaponized drone swarms. They don't think they really have a defense against that. So the military wants a multilayer detection capability and the option of either electronic or kinetic mitigation, depending on the area of operations, rules of engagement."
The potential threat from small UAVs in the hands of terrorists also has attracted the attention of regulatory agencies, such as the U.S. Federal Aviation Administration (FAA), which launched its Pathfinder Program in May 2015 as a partnership with industry to explore the next steps in unmanned aircraft operations beyond the type of operations the agency proposed in the draft small unmanned aircraft systems rule. The program began with three industry partners looking at possible UAV applications in different focus areas, all also vulnerable to potential UAV threats.
Cable News Network (CNN) in Atlanta is looking into visual line-of-sight operations for the safe use of UAVs for news gathering in urban areas.
PrecisionHawk in Raleigh, N.C., is exploring extended visual line-of-sight operations in rural areas to enable UAV flights outside the pilot's direct vision for crop monitoring in precision agriculture.
The BNSF Railway Co. in Commerce, Calif., is exploring beyond line-of-sight command-and-control challenges to using UAVs to inspect rail system infrastructure in rural and isolated areas.
CACI International Inc. in Arlington, Va., is evaluating how the company's technology can help detect UAVs flying near airports.
In 2016, the FAA further expanded Pathfinder by signing co-operative research and development agreements (CRDAs) with Liteye Systems Inc. in Centennial, Colo.; Sensofusion USA in New York; and Gryphon Sensors LLC, an SRC company in North Syracuse, N.Y.
DeDrone GmbH in Kassel, Germany, has developed the DroneTracker multi-sensor, counter-UAV system.
Liteye is the North American manufacturing and integration partner for three British developers working together on the Anti-UAV Defence System (AUDS) - Blighter Surveillance Systems in Great Chesterford, England; Chess Dynamics Ltd. in Horsham, England; and Enterprise Control Systems Ltd. in Wappenham, England. The CRDA calls for Liteye to test the AUDS integrated detect-track-disrupt-defeat C-UAV system at U.S. airports selected by the FAA.
AUDS integrates Blighter's A400 series Ku-band electronic scanning air security radar; Chess Dynamics' stabilized electro-optic director, infrared and daylight cameras, and target tracking software; and an Enterprise directional radio frequency (RF) inhibitor to detect, track, classify, disrupt, and defeat UAVs as far away as six miles. The team claims AUDS also is effective against Group 1 micro and mini UAVs at ranges of several miles.
UAV-aircraft near misses
More than 100 pilot reports occur every month about UAVs flying too closely to U.S. airports and commercial aircraft. This has created a major safety concern for the FAA, and a security issue for the U.S. Department of Homeland Security (DHS).
"AUDS is able to operate effectively in complex airport environments night and day, whatever the weather, and without disrupting other airport equipment. Using AUDS, the operator can effectively take control of a drone and force a safe landing inside or outside the airport perimeter," according to Mark Radford, speaking on behalf of the British/American team.
"The system can also assist airport authorities to track down the UAV pilots for prosecution by providing evidence - video footage or radar tracks - to the relevant authorities. We can also integrate 'friendly assets' into the AUDS platform - for example, a 'friendly' drone - to extend the threat detection and situational awareness capabilities of the system and to help capture rogue drone pilots," Radford says.
Sensofusion will test its AIRFENCE system, already being used in Europe to help secure high-profile government buildings, police and military sites, and prisons, as a C-UAV candidate to defend U.S. airports from hostile or intrusive UAVs.
"We first developed the technology to detect, locate, track, and gain control over UAS three years ago as a military project and operated it with three European armies under NATO," says Sensofusion CEO Tuomas Rasila.
Gryphon will test a prototype UAV sensor detection system at FAA-selected airports. "Detecting these threats is challenging because most of them are very small, fly low to the ground, and can be pre-programed to fly autonomously," notes company president Tony Albanese.
"We anticipate receiving valuable data from each of these trials that could result in FAA-approved operations in the next few years. They will also give insight into how unmanned aircraft can be used to transform the way certain industries do business - whether that means making sure trains run on time, checking on the health of crops, or reporting on a natural disaster," FAA Administrator Michael Huerta says. "[Our industry partners] reached out to the FAA to work with us on exploring [unmanned operations and] have committed extensive resources to perform research that will help us determine if and how we can safely expand unmanned aircraft operations in the United States."
Many aerospace companies of all sizes - some with UAV backgrounds, some without - have joined the C-UAV effort.
Growing counter-UAV effort
Airbus Defence and Space in Toulouse, France, has developed a C-UAV System combining the company's radars, IR cameras, and direction finders with state-of-the-art data fusion and signals analysis. The system can identify an approaching drone and assess its threat potential at ranges between 3.1 and 6.2 miles, then offer electronic
countermeasures like its Smart Responsive Jamming Technology, to minimize the risk of collateral damage.
"As a specialist in defense electronics, we have all the technologies in our portfolio and the integration knowledge needed to set up a quick-response protection system with extremely low false alarm rates," claimed Thomas Müller, head of electronics and border security at Airbus Defence and Space.
Another United Kingdom company - Drone Defence in Doncaster, England - recently announced what it calls Drone Defenders, former military and law enforcement personnel trained to use the Dedrone DroneTracker to detect and identify unauthorized UAVs, then employ either the company's man-portable Dynopis E1000MP to jam the UAV's controls or its Net Gun X1 C-UAV system to capture the aircraft. Operating from either a fixed location or as a mobile unit, DroneTracker uses acoustic, optical, and infrared sensors for real-time detection and identification.
In September, Van Cleve & Associates in Alexandria, Va., and Open Works Engineering in Riding Mill, England, bested six other international competitors to win the non-profit Mitre Corp. Countering Unmanned Aircraft Systems Challenge.
Van Cleve's DroneRanger was declared the best end-to-end system and best detection tool for interdicting small UAVs, while the Open Works SkyWall 100 won in the interdiction system category. The other finalists were:
- the DroneTracker from DeDrone GmbH in Kassel, Germany;
- the Mesmer platform Department 13 International in Columbia, Md.;
- the Icarus system from Lockheed Martin Corp.;
- the Knox platform from MyDefense Communications in Sundby, Denmark;
- the Dronebuster system from Radio Hill Technology in Portland, Ore.; and
- the DroneBlocker tool from TrustComs/Trifecta Global in Versailles, France.
MITRE C-UAS Challenge entrants from around the globe were asked for solutions that could detect drones smaller than five pounds during flight and determine which were threats, based on geographic location and flight trajectory, then interdict those perceived as threats by forcing them to land in a safe area for intact recovery.
U.S. military researchers are developing the Aerial Dragnet system for persistent wide-area surveillance of several small
UAVs in urban terrain.
Counter-drone research
The U.S. Defense Advanced Research Projects Agency (DARPA) in Arlington, Va., is investigating C-UAV, for future applications and more near-term use. Two of those are Aerial Dragnet and the Multi-Azimuth Defense Fast Intercept Round Engagement System (MAD-FIRES).
The 13 September 2016 Broad Area Announcement DARPA issued for Aerial Dragnet described the need and the goal for persistent wide-area surveillance of multiple small UAVs in urban terrain on a citywide scale. "Small UAS [unmanned aircraft systems] are rapidly becoming low-cost aerial platforms for hostile reconnaissance, targeting, and weapon delivery," DARPA officials say.
Unlike traditional air targets, small UAVs fly at altitudes lower than 400 feet above the ground, which make them easily hidden by complex terrain. These small unmanned aircraft also move more slowly than 90 knots, which makes them difficult to differentiate from other movers. These unmanned aircraft also are smaller than 55 pounds, making them difficult to sense.
"In future urban battlegrounds, U.S. forces will be placed at risk by small UAS that use buildings and naturally occurring motion of the clutter to make surveillance impractical using current approaches," DARPA officials say. "The rapid proliferation of commercial UAS with increasing endurance and payload capacity drives the need for a future urban aerial surveillance system that can detect, track, and classify many different UAS types at longer ranges in urban terrain."
Existing C-UAV approaches, the DARPA Aerial Dragnet solicitation continues, rely either on line-of-sight (LOS) target viewing not possible in urban terrain, or exploit fragile vulnerabilities of commercial UAVs.
"This program seeks to develop systems for threat-agnostic non-line-of-sight (NLOS) surveillance that exploit and adapt to the fundamental physics of the threat and the urban environment," the Aerial Dragnet solicitation says. "To achieve wide-area performance, proposals are solicited for a scalable network of surveillance nodes, each consisting of sensors mounted on a persistent unmanned aerial platform that can sense over and into complex terrain. The resulting system will produce real-time situational awareness of the airspace in urban areas below altitudes covered by conventional air surveillance systems."
Program Manager Jeff Krolik says real-time linkage of Aerial Dragnet's multiple UAVs and sensors can provide a comprehensive network for persistent wide-area surveillance of all low-flying UAVs in an urban setting. "Commercial websites currently exist that display in real-time the tracks of relatively high and fast aircraft - from small, general aviation planes to large airliners - all overlaid on geographical maps as they fly around the country and the world," Krolik says. "We want a similar capability for identifying and tracking slower, low-flying unmanned aerial systems, particularly in urban environments."
Counter-drone surveillance
The program office anticipates achieving that goal through innovative networking of surveillance nodes, perhaps mounted on tethered or long-endurance UAVs, to cover neighborhood-sized urban areas. Using sensor technologies to look over and between buildings, the nodes could maintain UAV tracks even when the aircraft disappears around corners or behind objects.
Aerial Dragnet's sensor data would inform a continually updated common operational picture (COP) of the airspace at altitudes below where current aircraft surveillance systems can monitor, using secure data links to electronically disseminate it to authorized users. DARPA says the program also will focus on combining low-cost sensor hardware with software-defined signal processing hosted on existing UAVs, resulting in cost-effective, scalable urban coverage and rapid upgradeability as new, more capable and less expensive technologies become available.
DARPA's MAD-FIRES program is strictly for military use, although it may yield some commercially valu- able anti-drone technologies. MAD-FIRES was created in response to an escalating rate of attacks by unmanned vehicles, missiles, small planes, fast attack craft, and other platforms posing "a perennial, evolving, and potentially lethal threat to ships and other maritime vessels." Those risks, combined with ever-morphing threats, make leading-edge defensive air and surface combat technologies critical. That is especially true for ships equipped with current close-range gun systems, enhancing their ability to rapidly and with high precision engage a swarm of diverse targets coming from a range of directions.
Today's counter-drone systems must be able to work quickly, as terrorists and other criminals are weaponizing commercial UAVs with potentially disastrous results.
"The goal of the program is to design and develop technologies associated with a medium-caliber guided projectile that would combine the guidance, precision and accuracy generally afforded by missiles with the speed, rapid-fire capability, and large ammunition capacity afforded by bullets," explains MAD-FIRES Program Manager Jerome Dunn.
"MAD-FIRES aims to advance the state-of-the-art in defensive gun systems by creating a new, low-cost technological foundation for guided, gun-launched projectiles. Specifically, MAD-FIRES aims to incorporate enhanced ammunition rounds able to alter their flight path in real time to stay on target and a capacity to continuously target, track, and engage multiple fast-approaching targets simultaneously and re-engage any targets that survive initial engagement," Dunn says.
Rapidly evolving technologies
The future of small UAVs as a threat to military and civilian infrastructure - and human lives - and the level of success achieved through dozens of C-UAV efforts involving a host of different sensors and mitigation technologies remains murky, but rapidly evolving.
"On the defense side, you'll see more use at forward-deployed locations, integrating C-UAV into existing perimeter security systems, such as tethered aerostats, to cover more area. You'll see more deployable systems that can be easily transitioned to a mobile capability. Northrop Grumman recently demonstrated a system where an app on a soldier's smartphone can use its microphone to detect small drones. The range probably isn't great, but if every soldier is a sensor, that would help detect and triangulate," says Hitachi Federal's Jensen.
"On the commercial side, you'll see a lot more interest as proliferating small commercial drones get used for more and more applications. Companies won't want them flying over their test sites, the public won't want them flying over their homes. Stadiums, prisons, will show a much greater interest as people gain more ideas on what they can use drones for, including bad uses. So there will be lots of investment and attempts to defeat all kinds of drones and swarms, plus how to then defeat those. And that will just keep going back and forth," Jensen says.
While concern is growing about the kind of threats posed in a world filled with small, but increasingly versatile UAVs and hundreds of millions of dollars are being devoted worldwide to develop C-UAV technologies, reality may be lagging behind perception, at least for now, says Frost & Sullivan's Blades.
"It's a perceived threat. Whether that is real now is questionable. If it is a threat, why wasn't it one long ago with model airplanes? Granted, once you take off a fixed-wing model airplane, there's not a lot it can do between take-off and landing, while the more maneuverable UAV can get into smaller, more confined spaces," Blades says.
"C-UAV is almost all sensor-based, with the military spending millions on better sensors with better SWaP, which has driven a lot of innovation," Blades adds. "For now, the capability of inexpensive rotor-wing drones and autonomy is not yet to the point where a terrorist cell could get 20 or 30 drones and send them out in a swarm attack. It's probably not that far off."
X . I Navy preps Triton drone system for 2018 deployment
WASHINGTON – The U.S. Navy is working with Northrop Grumman to run tests and maintenance services on the MQ-4C Triton drone, mission control and operator training systems – to prepare the unmanned aerial system for its initial deployment next year. Defense Systems reports. Continue reading original article
The Military & Aerospace Electronics take: 8 Nov 2017 -- The MQ-4C Tritonunmanned aircraft’s first deployment will be from the U.S. Naval base in Guam. The Triton will execute autonomous maritime surveillance operations from land-based command facilities.
These maintenance and testing services will include procuring field service representatives' technical support to ensure that the new system is capable of intelligence, surveillance and reconnaissance missions once deployed, according to a Department of Defense contract release.
The idea is to configure a maritime-specific drone technology to compliment marine patrol missions; the Triton operates a 360-degree sensor suite that allows for nearly real-time video, long-endurance surveillance, and tactical support for operational commanders. This allows for the system to be capable of capturing both hi-res images and full motion video for surveillance purposes.
Raytheon to provide multispectral sensor system for Navy MQ-4C Triton maritime surveillance UAV
CRANE, Ind. – U.S. Navy maritime surveillance experts are ordering three multispectral targeting sensors for new models of the Northrop-Grumman MQ-4C Triton long-range unmanned aerial vehicle (UAV) for maritime patrol applications.
Officials of the Naval Surface Warfare Center Crane Division in Crane, Ind., announced a $7.2 million contract Thursday to the Raytheon Co. Space and Airborne Systems segment in McKinney, Texas, for three AN/DAS-3 Multispectral Targeting System (MTS) sensors for low-rate initial production versions of the Triton maritime surveillance UAV.
The AN/DAS-4 is the latest variant of the Raytheon MTS family of electro-optical sensors, and incorporates greater fire control and target location accuracy for precise targeting coordinates, Raytheon officials say. The Triton is a maritime version of the Northrop Grumman RQ-4 Global Hawk.
The Raytheon MST provides intelligence, surveillance, and reconnaissance (ISR), detection, identification, and targeting capability in day and nighttime operations on manned and unmanned aircraft.
MTS sensors provide detailed intelligence data from the visual and infrared spectra. The new AN/DAS-4 MTS variant enables mission commanders to use high-definition data from an airborne tactical sensor to identify and engage targets with much greater accuracy, Raytheon officials say. Related: Raytheon wins another contract for Multi-Spectral Targeting Systems for Navy helicopters
The DAS-4 includes four high-definition cameras covering five spectral bands; a three-color diode pump laser designator and rangefinder; laser spot search and track capability; automated sensor and laser bore sight alignment; three-mode target tracker; and built-in provisions for future growth.
This advanced electro-optical and infrared (EO/IR) system provides tracking and laser designation for the Griffin and Paveway missiles, as well as all tri-service and NATO laser-guided munitions. MTS sensors offer several fields of view, electronic zoom, and multimode video tracking. [Native Advertisement] Multispectral sensors divide images and video into several light wavelengths -- typically three to 15 spectral bands -- across the electromagnetic spectrum, including light from frequencies beyond the visible light range such as infrared and ultra-violet.
Dividing images into several different wavelengths enables the sensor to extract additional information the human eye fails to capture with its receptors for red, green and blue. Related: Navy orders three MQ-4C Triton long-range maritime surveillance UAVs for anti-submarine warfare (ASW)
The L-3 Technologies Advanced Laser Systems Technology (ALST) segment in Orlando, Fla., is providing the eye-safe laser rangefinders for the Raytheon MTS.
Raytheon has delivered more than 3,000 MTS sensors to U.S. and international armed forces and integrated 44 variants on more than 20 manned helicopters, fixed-wing aircraft, and UAVs.
Thursday's contract also asks Raytheon to provide one electronic unit for early models of the Triton maritime surveillance UAV. On this contract Raytheon will do the work in McKinney, Texas, and should be finished by January 2020.
X . II The Dark and Light Sides of Latest Drone Technology
FILE - The Inspire 1, a drone manufactured by DJI, is flown in Davenport, Calif., March 10, 2015.
HOUSTON, TEXAS — Drones, the small flying machines carrying cameras, have become a modern-day blessing and a curse for law enforcement and scientists.
“The thing that can kind of keep you up at night is somebody using it to harm people. We’ve seen that already,” said Larry Satterwhite, Houston Police Department’s assistant chief over homeland security.
Drones have become easily accessible to consumers at relatively low costs. Law enforcement officials and researchers said people are using them to harm others. Watch: The Dark and Light Sides of Latest Drone Technology
Embed code
Copy and paste the embed code below. The code changes based on your selection.
Drones as threats
“There are actual cases in the United States and in other places where people have brought in drugs or guns to prisons and they drop them to the inmates. In certain areas of the Middle East right now, they’re using them as weapons and dropping small explosive onto people,” said Richard Lusk, director of Unmanned Aerial Systems Research Center at Oak Ridge National Laboratory.
“Technology as it is, is going so fast. We often find ourselves playing catchup to the technology that’s out there,” Satterwhite said.
There are ways of preventing threats posed by drones by attacking the electronics inside the machines.
“They’re essentially electronic devices that rely in part on GPS. So, if you think about that, you can spoof a GPS system. You can use an EMP (electromagnetic) pulse or an RF (radiofrequency) pulse to disrupt their communications from the driver or actually the onboard electronics and then basically fry the electronics,” said Lusk. Drones as lifesavers
On the flip side, drones can also have lifesaving benefits.
“Like any technology there is the yin and the yang. There’s the dark and the light,” Lusk said.
In the chemical industry, drones are being used to inspect structures to replace people in doing dangerous work. The Shell, Deer Park Refinery near Houston started using drones in the past year.
“At a big site like mine, where we have super structures that are almost 400 feet in the air, I’m not having to get somebody lifted up some way. I can put that drone up there and get a great visual of what needs to be done and then decide how we respond to that event,” said Gary Scheibe, Shell Deer Park Refinery security manager. Extra set of eyes
A growing number of U.S. law enforcement agencies are using drones to investigate and clear freeways faster. Drones can also help in search and rescue cases.
“You can see the body heat maybe of a child, whereas people walking across a field may never see them and this has been proven multiple times worldwide,” Lusk said.
The technology is continuing to advance. Sophisticated sensors such as night vision, methane detectors and X-ray capabilities can be placed on drones. Researchers are even looking at drones the size of a dragonfly.
“Probably along the lines of some Department of Defense and high-end research is to make them mimic small-insect sized, therefore you don’t pay any attention to insects outside so you wouldn’t pay attention to that [drone],” said Lusk.
Drone researchers say it will become an arms race to develop methods of preventing harmful drones, as people continue to use these machines for the good.
X . IIII Passenger drone
A passenger drone (also known as a drone taxi or pilotless helicopter) is a type of unmanned aerial vehicle (UAV) that carries passengers. The first passenger drone was introduced at the Computer Electronics Show (CES) 2016 by Chinese entrepreneurs and is called the Ehang 184
First Electric Passenger Drone: Ehang 184
The use of UAVs, or drones, has been popular in recent years. Once used primarily for recreation by hobbyists, drones are now used in military operations and for conducting research. More recently, commercial companies have explored using drones to transport merchandise. Since 2011, several commercial developers and amateur builders have conducted short manned flights on experimental electric multi-rotor craft. In January 2016, the first commercially produced drone capable of carrying a human was introduced by Chinese entrepreneurs at CES 2016.
Radio controlled model airplanes have been a popular hobby since the 1970s. Drones, especially electric powered multi-rotor craft, have only emerged among hobbyists in the past ten to fifteen years. Drones differ from model airplanes in that they implement a measure of autonomy in their operation. Aerial drones have been used by militaries since World War II. Military drone capability expanded rapidly at the end of the twentieth century. Military drones have seen extensive use during campaigns in Iraq and Afghanistan.
Throughout the twentieth century, and more recently, designers have proposed and developed many radical ideas for personal flight. Among these are the personal jetpack introduced in the 1960s, the Aeromobil flying car concept of the early 1990s, and the Terrafugia flying vehicle concept of 2006. While these are steered by the pilot, and thus are not technically considered drones, they nevertheless serve as inspirational precursors to the flying passenger drones being developed today.
Future use of passenger drones
The future of passenger drones remains uncertain since this technology is so new. Innovation in aerial drone technology, and in aerial traffic coordination, control, and collision-avoidance could result in rapid proliferation of passenger drones for civilian travel. Several companies are exploring the use of passenger drones as air-taxis and for air-ambulance services. Passenger drone developers are working to overcome many challenges, including noise, small useful load, short flight times, airspace regulations, and scarce data on both safety and general operations.
X . IIIII Flying car (aircraft)
A flying car is a type of personal air vehicle that provides door-to-door transportation by both ground and air. The term "flying car" is often used to include roadable aircraft and hovercars.
Many prototypes have been built since the first years of the twentieth century, but no flying car has yet reached production status.
Their appearance is often predicted by futurologists, with their failure ever to reach production leading to the catchphrase, "Where's my flying car?"
Flying cars are also a popular theme in fantasy and science fiction stories.
"Where's my flying car?" on the March 2008 cover of Popular Science, a technology magazine that has reported on flying cars and other futuristic aircraft throughout the 20th century.
Early developments
In 1926, Henry Ford displayed an experimental single-seat aeroplane that he called the "sky flivver". The project was abandoned two years later when a distance-record attempt flight crashed, killing the pilot.[1] The Flivver was not a flying car at all, but it did get press attention at the time, exciting the public that they would have a mass-produced affordable airplane product that would be made, marketed, sold, and maintained just like an automobile. The airplane was to be as commonplace in the future as the Model T of the time.
In 1940, Henry Ford famously predicted: "Mark my word: a combination airplane and motorcar is coming. You may smile, but it will come.”
In the period between 1956 - 1958, Ford's Advanced Design studio built the Volante Tri-Athodyne, a 3/8 scale concept car model. It was designed to have three ducted fans, each with their own motor, that would lift it off the ground and move it through the air. In public relation release, Ford noted that "the day where there will be an aero-car in every garage is still some time off", but added that "the Volante indicates one direction that the styling of such a vehicle would take".
In 1957, Popular Mechanics reported that Hiller Helicopters was developing a ducted-fan aircraft that would be easier to fly than helicopters, and should cost a lot less. Hiller engineers expected that this type of an aircraft would become the basis for a whole family of special-purpose aircraft.
In 1956, the US Army's Transportation Research Command began an investigation into "flying jeeps", ducted-fan-based aircraft that were envisioned to be smaller and easier to fly than helicopters. In 1957, Chrysler, Curtiss-Wright, and Piasecki were assigned contracts for building and delivery of prototypes. They all delivered their prototypes; however, Piasecki's VZ-8 was the most successful of the three. While it would normally operate close to the ground, it was capable of flying to several thousand feet, proving to be stable in flight. Nonetheless, the Army decided that the "Flying Jeep concept [was] unsuitable for the modern battlefield", and concentrated on the development of conventional helicopters. In addition to the army contract, Piasecki was developing the Sky Car, a modified version of its VZ-8 for civilian use.
In the mid-1980s, former Boeing engineer, Fred Barker, founded Flight Innovations Inc. and began the development of the Sky Commuter, a small duct fans-based VTOL aircraft. It was a compact, 14-foot-long (4.3 m) two-passenger and was made primarily of composite materials. In 2008, the remaining prototype was sold for £86k on eBay.
Transition
Production Prototype of Terrafugia Transition at the N.Y. Int'l Auto Show in April 2012
In 1942, the Soviet armed forces experimented with a gliding tank, the Antonov A-40, but it was not capable of flying on its own.
AeroMobil currently fly-tests a prototype that obtained Slovak ultralight certification. When the final product will be available or how much it will cost is not yet specified.[9]
Urban Aeronautics' X-Hawk[10] is a VTOL turbojet powered aircraft announced in 2006 with a first flight planned for 2009. It was intended to operate much like a tandem rotorhelicopter, but with ducted fans rather than exposed rotors. The requisite decrease in rotor size would also decrease fuel efficiency. The X-Hawk was being promoted for rescue and utility functions. As of 2013, no flights had been reported. Terrafugia have a flying road vehicle, the Terrafugia Transition On 7 May 2013, Terrafugia announced the TF-X, a plug-in hybrid tilt-rotor vehicle that would be the first fully autonomous flying car. It would have a range of 500 miles (800 km) per flight and batteries are rechargeable by the engine. Development of TF-X is expected to last 8–12 years, which means it will not come to market before 2021–2025.
The Moller Skycar M400[11][12] is a prototype personal VTOL (vertical take-off and landing) aircraft which is powered by four pairs of in-tandem Wankel rotary engines, and is approaching the problems of satellite-navigation, incorporated in the proposed Small Aircraft Transportation System. Moller also advises that, currently, the Skycar would only be allowed to fly from airports & heliports. The Skycar M400 has tiny wheels and no road capability at all. Moller has been developing VTOL craft since the late 1960s, but no Moller vehicle has ever achieved free flight out of ground effect. The proposed Autovolantor model has an all-electric version powered by Altairnano batteries.[13]
The Xplorair PX200 is a French project of single-seater VTOL aircraft without rotating airfoil, relying on the Coandă effect and using an array of small jet engines called thermoreactors embedded within tiltwings' body. Announced in 2007, the project has been funded by the Government of France and is now supported by various aerospace firms. A full-scale drone is scheduled for flight at Paris Air Show 2017, followed by the commercialization of a single-seater flying car in the years after.
The SkyRider X2R is a prototype of a flying car developed by MACRO Industries, Inc. It is lighter than the Moller Skycar which has never successfully flown untethered.
Also notable is the roadable aircraft PAL-V ONE, which is an autogyro or gyrocopter that can be taken to the road, too. Zee.Aero and Kitty Hawk Corporation are developing flying cars.
Flying cars are planned to enter Russian market in 2018.
Design
Engineering
A practical flying car would have to be capable of safely taking off, flying and landing throughout heavily populated urban environments. However, to date, no vertical takeoff and landing (VTOL) vehicle has ever demonstrated such capabilities. To produce such an aircraft would require a propulsion system that is quiet, to avoid noise complaints, and has non-exposed rotors so it could be flown safely in urban environments. Additionally, for such aircraft to become airborne, they would require very powerful engines which would create huge and concentrated downdrafts, a bad idea in an urban environment. Many types of aircraft technologies and form factors have been suggested, such as ducted-fan and tiltrotor vehicles, but most previous designs have suffered from problems; ducted-fan aircraft tend to easily lose stability and have difficulty traveling greater than 30–40 knots, while tiltrotors, such as the V-22 Osprey, are generally noisy.
Economics
Due to the requirement of propulsion that is both small and powerful, the cost of producing a flying car would be very high and estimated by some as much as 10 million dollars. In addition, the flying car's energy efficiency would be much lower compared to conventional cars and other aircraft; optimal fuel efficiency for airplanes is at high speeds and high altitudes, while flying cars would be used for shorter distances, at higher frequency, lower speeds and lower altitude. For both environmental and economic reasons, flying cars would be an enormous use of resources.
Safety
Although statistically, commercial flying is much safer than driving, unlike commercial planes personal flying cars might not have as many safety checks and their pilots would not be as well trained. Humans already have problems with the aspect of driving in two dimensions (forward and backwards, side to side), adding in the up and down aspect would make "driving" or flying as it would be, much more difficult; however, this problem might be solved via the sole use of self-flying and self-driving cars. In mid-air collisions and mechanical failures, the aircraft could fall from the sky or go through an emergency landing, resulting in deaths and property damage. In addition, poor weather conditions, such as low air density, lightning storms and heavy rain, snow or fog could be challenging and affect the aircraft's aerodynamics
The flying car was and remains a common feature of conceptions of the future, including imagined near futures such as those of the 21st century. Complaints of the non-existence of flying cars have become nearly idiomatic as expressions of disappointment in the failure of the present to measure up to the glory of past predictions.
In 1999 the U.S. journalist Gail Collins noted:
Here we are, less than a month until the turn of the millennium, and what I want to know is, what happened to the flying cars? We're about to become Americans of the 21st century. People have been predicting what we'd be like for more than 100 years, and our accoutrements don't entirely live up to expectations. (...) Our failure to produce flying cars seems like a particular betrayal since it was so central to our image.
As a result, flying cars have been referred to jokingly with the question "Where's my flying car?", emblematic of the supposed failure of modern technology to match futuristic visions that were promoted in earlier decades.
Aired on 8 January 1998, Seinfeld's 167th episode, "The Dealership", featured George and Jerry complaining about the non-existence of the flying cars. Jerry says, "It's like we're living in the '50s here."
A 2001 IBM television commercial featured Avery Brooks complaining, "It is the year 2000, but where are the flying cars? I was promised flying cars. I don’t see any flying cars. Why? Why? Why?"[26]
Comedian Lewis Black had a similar routine early in the decade, in which he says, "This new millennium sucks! It's exactly the same as the old millennium! You know why? No flying cars!"[citation needed] The Flying Car was a comedy short film written by Kevin Smith in 2002 for The Tonight Show with Jay Leno. It featured Dante Hicks and Randal Graves stuck in traffic, discussing the lengths to which a man might go to obtain such a vehicle.
In 2008, Onion News Network's 245th episode, titled "Mean Automakers Dash Nation's Hope for Flying Cars", featured The Onion's anchor Brandon Armstrong humorously arguing about the feasibility and existence of flying cars with representatives from General Motors, Toyota and Ford.[28]
"Spinner" is the generic term for the fictional flying cars used in Blade Runner, set in futuristic-cyberpunkLos Angeles of 2019. A Spinner can be driven as a ground-based vehicle, and take off vertically, hover, and cruise using jet propulsion much like Vertical Take-Off and Landing (VTOL) aircraft. They are used extensively by the police to patrol and survey the population, and it is clear that despite restrictions wealthy people can acquire spinner licenses.[30] The vehicle was conceived and designed by Syd Mead who described the spinner as an "aerodyne"—a vehicle which directs air downward to create lift, though press kits for the film stated that the spinner was propelled by three engines: "conventional internal combustion, jet, and anti-gravity"[31] Mead's conceptual drawings were transformed into 25 working vehicles by automobile customizer Gene Winfield.[32] A Spinner is on permanent exhibit at the Science Fiction Museum and Hall of Fame in Seattle, Washington.[33]
Back to the Future and Back to the Future Part II (1985/1989)
In Back to the Future Part II and the ending of Back to the Future, Doc Brown invites Marty and his girlfriend Jennifer in his modified flying DeLorean time machine, and time travels to the year 2015 where flying hovercars are a common sight.
The Fifth Element (1997)
In The Fifth Element, set in 2263 New York City, flying cars are used as main mean of transportation. The production design for the film was developed by French comics creators Jean Giraud[34] and Jean-Claude Mézières. Mézières wrote the book The Circles of Power, which features a character named S'Traks, who drives a flying taxicab through the congested air traffic of the vast metropolis on the planet Rubanis. Besson read the book and was inspired to change the Dallas character to a taxicab driver who flies through a futuristic New York City.[36][37]
Chitty Chitty Bang Bang: Professor Caractacus Potts salvages a broken classic race car and converts it into a flying car with wings sporting external propellers.
Halloweentown: Marnie Cromwell, her brother Dylan and sister Sophie take a flying bus to Halloweentown to visit their grandmother and save Halloweentown from a villain named Kalabar.
Thunderbirds: Lady Penelope's pink Ford can extend wings and a gas-powered jet engine and take flight, retracting its back wheels. It can also, from flight setting, travel on water, where the wings fold down, and the front wheels retract. In the first film of the original puppet show, in Alan's dream, the original FAB1 Rolls-Royce flew him and Lady Penelope to the Swinging Star.
Sky High: Sky High is a high-school for superheroes and since the school floats thousands of feet above ground, they make use of flying school-buses to get to-and-fro the ground
In the children's TV show, Supercar, the flying car "Supercar" was invented by Rudolph Popkiss and Horatio Beaker, and piloted by Mike Mercury.
Mighty Morphin' Power Rangers: In this 1993 TV show Power Rangers. Billy the Blue Ranger invents a flying car using the Volkswagen Beetle he dubbed the "Rad Bug" It was useful at times when they couldn't teleport to places.
Power Rangers: Turbo In the 1997 season 5, Griller the monster makes cars fly out of control and crash into buildings and on the ground in "Cars Attack". Later on in the episode "The Wheels of fate" a flying red car named Lighting Cruiser is a vehicle that Divatox tried to capture but T.J. captured the car. The Lighting Cruiser has auto driving and can go from wheel mode to flight mode by turning 4 wheels up allowing it to fly and it can fly like a jet. It would be used by T.J. along with Storm Blaster car which was used by Justin Stewart.
Buck Rogers (serial) In the 1939 black and white live action TV series, after Buck Rogers and Buddy Wade wake up from their deep sleep, they discover a future with flying cars.
Marvel's Agents of Shield Characters belonging to the secret spy agency routinely use flying cars designed to look like normal vehicles.
The Animatrix (2003)
In the best-selling[38] animated film The Animatrix (part of The Matrix saga), specifically in the episode called The Second Renaissance, appears a supposed TV commercial announcing a flying car called Versatran,[39][40] this episode details the backstory of the Matrix universe, and the original war between man and machines which led to the creation of the Matrix; among its content shows the elaboration of the Versatran propulsion engines, and how those engines will latter be used in Hovercraft battleships like the Nebuchadnezzar (the ship Morpheus and Trinity use to rescue Neo).
The animated television series The Jetsons, premiered in 1962, reflected the idea that flying cars would become a significant means of transportation in the future. Flying cars were also featured in the film adaptation of The Jetsons.
Teenage Mutant Ninja Turtles: Fast Forward in the 6th season of Teenage Mutant Ninja Turtles 2003 TV series. Splinter the Rat and the 4 mutant Turtles Leo, Mike, Ralph, and Don time travel to the year 2105 in a New York city filled with flying cars and wheel cars. Cody Jones also runs Neil Tech industries.
In the animated television series, Sherlock Holmes in the 22nd Century, set in the 22nd century in New London, people use flying cars as main mean of transportation.
Cloudy with a Chance of Meatballs A scientist Flint Lockwood attempts to build a flying car, but it crashes in the ocean. Later on, Flint Lockwood finally succeeds in building a flying car which he uses to fly up to his machine causing raining food disaster.
Despicable Me 2 Lucy Wilde owns a car that has the ability to convert into plane mode and both Lucy Wilde and Felonius Gru make their getaway from the Paradise Mall and the cars wings extend out and it flies away.
Home In the 2015 DreamWorks movie, an alien named Oh shows a girl named Tip her car that he wrecked and fixed it into a flying car which they both fly in to save the world.
Pinocchio 3000: Flying cars can be seen in the city Scamboville. Mayor Scamboli owns a flying black car, Marline owns a red flying car convertible. The Scambocop owns a flying police car. Pinocchio steals the flying taxi bus and flies in the skyways to find his dad Geppetto while the Scambocop goes on a flying car chase to pull over the flying taxi bus.
Meet the Robinsons: In this Disney CGI movie Wilbur takes Lewis as a kid to visit the future in the red flying car time machine and visits the future where flying cars are seen in the sky in the futuristic city made by Robinson Industries.
Lilo & Stitch: In this Disney cartoon movie the monster alien named Stitch escapes from jail on a spaceship. He then escapes in a red flying car which he pilots in outer space and crash lands on Earth in Hawaii. Later on near the end of the film Stitch can be seen driving his red hovercar.
Inspector Gadget's Biggest Caper Ever In this CGI movie the gadgetmobile converts from car mode into plane mode by extending its wings out flying over the hole in the road.
Samurai Jack: In this Cartoon Network TV show. Jack has been sent forward in time through the time gate far into the future where he discovers flying hovercars in the city of Aku.
Gerry Anderson's New Captain Scarlet: Spectrum owns a fleet of red sports cars (Cheetah RRV), which can extend wings, fire a thruster and either jump over obstacles in its path or fly. Moreover, Spectrum owns a flying motorcycle design (Skyrider, which does not have wheels) and a motor-tricycle design (Stallion Raid Bike). The latter has wings, so it can be launched from Skybase.
Phineas and Ferb: In the episode My Ride From Outer Space, the series' title characters repair and modify a crashed alien spaceship into a Hot-Rod themed flying car, they also modified their mom's station wagon into a flying car called The Flying Car of The Future, Today
Ben10: In 2 episodes, of the original series, that are set in the future, the title character's grandfather is seen driving a flying future-version of the series' signature Rust Bucket (the old RV that's used as the main transport in the series)
Generator Rex: Rex Salazar (the series' title character) is capable of creating bio-mechanical machines out of parts of his own body. One such machine is called a Hover-bike, a fast version of a Motorcycle that has no wheels and can hover a few feet above the ground, which he uses as his main means of transport.
Kim Possible: A muscle car, known as The Sloth was restored and used by the title character, Kim, and her twin brothers. The same car is then later modified more extensively as a rocket-propelled vehicle, and it eventually ends-up flying into outer-space
Video games
Back to the Future II & III NES 1990: Marty uses a remote control that allows the flying car Delorean to come to Marty whenever he needs to time travel to the years 1955, 1985A and 2015.
Space Quest IV The Time Rippers: While Roger Wilco visits Space Quest X: Latex Babes of Estros, he gets kidnapped by women called Latex Babes. After Roger saves them from the Sea Slug monster they take him in a flying car to the Mall in the Galaxy called Galaxy Galleria.
F-zero GX 2003: In the city called Aeropolis Multiplex, while you are racing in a hovercar. There are flying car traffic jams you can see while racing in your hovercar.
Wipeout Fusion 2002: There are flying cars that can be seen while racing on the moon.
Beam Breakers 2002: In the year 2173 you are driving in a flying car in the skyways dodging other flying cars in cities like "Neo York". There are 57 missions in story mode and the goals include dodging flying police cars, stealing other flying cars, ramming into an opponents, vandalizing restaurants and competing in a flying car race with flying car racers.
Eyetoy: Antigrav 2004: This game has flying cars in 4 cities you have to dodge while riding on a hoverboard.
Meet the Robinsons video game 2007: Wilbur uses the red flying car time machine to chase after the Bowler Hat Guy and Doris the robot hat who stole the blue flying car time machine. Also flying cars can be seen outside Robinson Industries.
Crime Cities 2001: Flying car can be seen flying in the city. Also you can drive your flying car and you can shoot flying cars out of the sky.
Samurai Jack: The Shadow of Aku 2004: For Nintendo Gamecube, PlayStation 2. In the futuristic city of Aku, Samurai Jack has to jump on flying hovercars to get from building to building and must be careful he doesn't fall to his death.
GTA:VC This game contains a cheat to make cars fly.
X . IIIIII How Do Drones Work And What Is Drone Technology
What is a drone and how do drones work is answered here in very easy to understand language. Drone technology is constantly evolving as new innovation and big investment is bringing more advanced drones to the market every few months.
In this article, I will discuss UAV technology on one of the most popular drones on the market which has plenty of top drone technology. Most drones will have very similar systems incorporated.
Unmanned aerial vehicle technology and science in the widest aspect covers everything from the aerodynamics of the drone, materials in the manufacture of the physical UAV, to the circuit boards, chipset and software which are the brains of the drone.
One of the most popular drones on the market was the Phantom 2 Vision+. This drone was very popular with professional aerial cinematographers. While slightly old now, it uses plenty of advanced technology which is present in the latest drones. This UAV is ideal to explain drone technology because it has everything in one package. It includes the UAV, gimbal and camera and uses some of the top drone technology on the market today.
In only a few months since writing this article, some new and highly advanced drones such as the DJI Mavic, Phantom 4 Pro and Inspire 2 have come to the market. The fast pace of drone technological innovation is tremendous. I’ve included these latest drone technology advancements in the below article. So it is right up to date including the links.
How Drones Work
A typical unmanned aircraft is made of light composite materials to reduce weight and increase maneuverability. This composite material strength allows military drones to cruise at extremely high altitudes. Drones are equipped with different state of the art technology such as infra-red cameras(military UAV), GPS and laser (military UAV). Drones can be controlled by remote control system or a ground cockpit.
Drones come in a wide variety of sizes, with the large drone mostly used for military purposes such as the Predator drone, other smaller drones which can be launched by hand, to other unmanned aircraft which require short runways. An unmanned aerial vehicle system has two parts, the drone itself and the control system.
The nose of the unmanned aerial vehicle is where all the sensors and navigational systems are present. The rest of the body is complete innovation since there is no loss for space to accommodate humans and also light weight. The engineering materials used to build the drone are highly complex composites which can absorb vibration which decreases the noise produced.
What Is A Drone – UAV Technology
Below we examine the science and drone technology behind the DJI Phantom 2 Vision+ UAV. Another terrific article is a drone components overview. This gives you a breakdown of the individual components seen in most drones.
Radar Positioning & Return Home
The flight radar displays the current position and location of the drone in relation to the pilot.
Exceeding the control range of the remote control will trigger ‘Return-to-Home’, meaning the UAV will automatically fly back to its takeoff point and land safely.
Gyro Stabilization, IMU And Flight Controllers
Gyro stabilization technology is one of the components which gives the drone its smooth flight capabilities. The gyroscope needs to work almost instantly to the forces moving against the drone. The gyroscope provides essential navigational information to the central flight controller.
The inertial measurement unit (IMU) works by detecting the current rate of acceleration using one or more accelerometers. The IMU detects changes in rotational attributes like pitch, roll and yaw using one or more gyroscopes. Some IMU include a magnetometer to assist with calibration against orientation drift.
The Gyroscope is a component of the IMU and the IMU is an essential component of the drones flight controller. The flight controller is the central brain of the drone.
Keep track of current flight telemetry and see what your drone sees on your mobile device.
No Fly Zone Drone Technology
In order to increase flight safety and prevent accidental flights in restricted areas, the new firmware for the Phantom UAV series includes a “No Fly Zone feature”. These no fly zones have been divided into two categories: A and B.
GPS Ready To Fly Mode Drone Technology
When the compass s is calibrated, the drone then seeks the location of GPS satellites. When more than 6 are found, it allows the drone to fly in “Ready To Fly” Mode.
Internal Compass & Failsafe Function
Allows the UAV and remote control system to know exactly its flight location. Calibration of the Compass is required to set a home point. The home point is the location where the drone will return to in case of loss of signal between the drone and the remote control system. This is also know as “fail-safe function”.
FPV (First Person View) Drone Technology
What FPV means is “First Person View” which means a video camera is mounted on the unmanned aerial vehicle and broadcasts the live video to the pilot on the ground so the pilot is flying the aircraft as if he/she was on-board the aircraft instead of looking at the craft from the pilot’s actual ground position.
FPV allows the unmanned aircraft to fly much higher and further than you can from the looking at the aircraft from the ground. FPV control allows for more precise flying around obstacles especially with unmanned aerial vehicles which can easily fly indoors and through forests via FPV where you would not be able to see obstacles from a fixed position.
The drone has a multiband wireless FPV transmitter built in along with an antennae. Depending on the drone, the receiver of the live video signals can be either the Remote Controller , Computer, Tablet or Smartphone device.
This live video feed is related to the strength of the signal between the ground control on the drone. The latest drone such as the DJI Mavic and Phantom 4 Pro can transmit live video up to 4.1 miles (7km). The Phantom 4 Pro and Inspire 2 use the latest DJI Lightbridge 2 transmission system to allow you to travel further and see more clearly.
The integrated controller and intelligent algorithms set a new standard for wireless HD image transmission by lowering latency and increasing maximum range and reliability.
FPV Over 4G / LTE Networks
In 2016, a new live video which transmits over the 4G / LTE network providing an unlimited range and low latency video. The Sky Drone FPV 2 comprises of a camera module, a data module and a 4G / LTE modem.
Firmware And Flight Assistant Port
The flight control system communicates with a PC Assistant through a Micro-USB cable. This allows configuration of the UAV and upgrade the firmware.
A very simple description of a drone is that it is a flying computer with a camera attached. Drones have firmware which can be updated to fix bugs and add new features.
LED Flight Indicators
These are found at the front and the rear of the drone. The front LEDs are for indicating where the nose of the drone is. The rear LEDs flight indicators light up to show the drones current flight status when the flight battery is turned on.
UAV Remote Control System
This is the wireless communication device using the 5.8 GHz frequency band. The drone and the remote control system should already be paired when it leaves the factory.
UAV Remote Control Receiver
The location of the 5.8 GHz receiver technology link button is under the UAV.
Range Extender UAV Technology
This is a wireless communication device which operates within the 2.4 GHz frequency. It is used to extend the range of communication between the smartphone or tablet and the drone in an open unobstructed area. Transmission distance can reach up to 700 meters. Each range extender has a unique MAC address and network name (SSID).
Some of the latest drones out of the box can fly using range to a distance of up to 3.1 miles (5km). Products such as FPV range extenders are very popular which can push the distance even further.
Smartphone App Featuring Ground Station Function
Smartphone App from Google Play or the Apple Store. The app allows for full control of the drone. There is a specific feature called ground station function on the Phantom 2 Vision+ quadcopter. This allows for flight missions by placing location waypoints and setting waypoint altitude and overall speed. The UAV should the be able to execute the flight mission automatically.
High Performance Camera
The Phantom 2 Vision+ carries an extremely high quality camera and a removable 4GB micro SD card. It shoots full HD video at 1080p/30 frames per second and 720p/60 frames per second, giving you crystal clear video and the option for slow motion shots.
The latest drones from DJI, Walkera, Yuneec and many other manufacturers now include cameras which can shoot film in 4k video and can take 12 megapixel stills.
Many of the earlier drones used cameras which were not fully suitable for aerial filming. Many of these aerial videos had barrel distortion because of the wide angle lens. The latest drones such as DJI Inspire 1, Phantom 3 Professional and Phantom 4 have a camera which is specifically designed for aerial filming and photography.
Drones With Zoom Cameras
In 2016 and 2017, a number of integrated gimbals with optical and digital zoom came to the market.
DJI released the Zenmuse Z3 is an integrated aerial zoom camera and is optimized for still photography. The Zenmuse Z3 which had a 7x zoom made up of 3.5x optical and 2x digital lossless zoom creating a 22 to 77 mm equivalent focal length range, making it ideal for industrial applications.
Then in October 2016, DJI released the Zenmuse Z30 camera. The powerful Zenmuse Z30 integrated aerial zoom camera has a 30x optical and 6x digital zoom for a total magnification up to 180x. This allows for more industrial uses such as inspecting cell towers or wind turbines to get a very detailed look at structures, wires, modules and components to detect damage. The Zenmuse is compatible with DJI Matrice range of drones.
The Walkera Voyager 4 comes with an incredible 18x zoom camera. The 18X optical zoom camera on the Voyager 4 has unobstructed 360 degree filming. It can film in 4K at 30 frames per second. The high definition image transmission system uses a 3-axis brushless stabilization gimbal technology.
Gimbals & Tilt Control
Gimbal technology is vital to capture quality aerial photos, film or 3D imagery. The gimbal allows for any vibration from the drone to not reach the camera. The gimbal allows you to tilt the camera while in flight, creating unique angles. It uses a 3 axial stabilized gimbal and has 2 working modes. Non-FPV mode and FPV mode.
Practically all the latest drones have integrated gimbals and cameras. The leader in aerial gimbal technology is DJI with their Zenmuse range. You can read this full article about drone gimbal design and components here.
Cinematography Drones Without Gimbals
At CES 2017 a company called Ambarella announced the H22 chip for cameras in drones. This H22 chip allows the camera to film in 4K HD video and includes electronic image stabilization, removing the need for gimbals.
Drones With Sensors
Multispectral, Lidar, Photogrammetry and Thermal sensors are now being used on drones to provide 3D models of buildings and landscape; Digital Elevation Maps (DEMS) of land, and provide precision data on the health of crops, flowers, fauna, shrubs and trees.
In 2016, we started to see drone using Time-of-Flight 3D depth camera sensors which can be used on their own or with the above sensors to provide solutions. ToF depth ranging camera sensors can be used for object scanning, indoor navigation, obstacle avoidance, gesture recognition, tracking objects, measuring volumes, reactive altimeters, 3D photography, augmented reality games and much more.
With Lidar and photogrammetry mapping, the drone will be programmed to fly over an particular area using autonomous GPS waypoint navigation. The camera on the drone will be taking photographs at 0.5 or 1 second intervals. These photos are then stitched together using specialized software to create the 3D image.
DroneDeploy is one of the leaders in the creation of 3D mapping software for the agriculture sector. Their latest software called Fieldscanner will work with any of the latest DJI drones such as the Mavic Pro.
Obstacle Detection And Collision Avoidance Technology
Many drones are now equipped with collision avoidance systems. These drone vision systems uses obstacle detection sensors to scan the surroundings while software algorithms and SLAM technology produce the images into 3D maps allowing the flight controller to sense and avoid the object. These systems are fusing one of more of the following sensors to sense and avoid obstacles;
Vision Sensor
Ultrasonic
Infrared
Lidar
Time of Flight (ToF)
Monocular Vision
Anti-Drop Kit
Helps to keep the stabilizer and camera connected to the unmanned aircraft.
Video Editing Software
Having an excellent quality video software is essential for post processing. Adobe DNG raw means that all the original image information is retained for later processing. An Adobe lens profile for barrel distortion removal is available for the DJI Phantom 2 Vision+ camera.
Operating Systems In Drone Technology
Some unmanned aircraft use MS Windows operating systems. However more and more UAV innovators are now using different versions of Linux. The Linux Foundation recently launched the Dronecode project.
The Dronecode Project is an open source, collaborative project that brings together existing and future open source unmanned aerial vehicle projects under a nonprofit structure governed by The Linux Foundation. The result will be a common, shared open source platform for Unmanned Aerial Vehicles (UAV).
Drones in some ways are flying computers. With an operating system, flight controllers, main boards with programmable code, they can also be hacked into. Like a computer, you can also protect your drone from hackers.
Latest Innovative Technological Drones
The latest advanced drones with patented technologies are the following;
DJI Mavic Pro – Small fold up drone with front and downward collision avoidance sensors. Super stable flight and filming capabilities.
DJI Phantom 4 Pro – with “Vision” collision avoidance technology. Multi purpose drone including aerial filming, photography and photogrammetry.
DJI Inspire 2 – Patented design and motors. Multi purpose drone with gimbals for professional aerial filming, photography, photogrammetry, multispectral and thermal imaging.
Yuneec Typhoon H Pro – uses the patented Intel “Realsense” collision avoidance technology. Great for professional aerial photography and filming
Walkera Voyager 4 – Professional drone with 18x optical zoom camera which makes it perfect for site surveying and search and rescue.
DJI Matrice 200 Commercial Quadcopter – Inbuilt redundancy with dual battery, IMU and Satellite navigation systems. Can mount 2 cameras under the quadcopter (e.g thermal and zoom camera). Ability to mount a camera on top of Matrice 200 which makes surveying of bridges real easy. 6 directions of collision avoidance using ToF laser, Ultrasonic and Vision sensors.
Intelligent Flight Systems
All these latest drones have intelligent flight controllers and modes such as Follow Me, Active Tracking, Waypoints, Return To Home and many others. The latest Phantom 4 Pro from DJI has the most autonomous intelligent flight modes of any drone.
Active Track (Profile, Spotlight, Circle)
Draw Waypoints
TapFly
Terrain Follow Mode
Tripod Mode
Gesture Mode
S-Mode (Sport)
P-Mode (Position)
A-Mode (Attitude)
Beginner Mode
Course Lock
Home Lock
Obstacle Avoidance
Drone Uses
Drones have so many terrific uses. When you mount a camera or sensors such as LiDAR, Thermal, ToF, Multispectral and many others, then the range of uses for drones just keeps expanding. Here is a nice list of drone uses.
Top Videos On Drone Technology
Below I have 2 videos which explain more about drone technology. The first video is by top UAV scientist Raffaello D’Andrea who gives us a terrific understanding of the software science behind UAV technology. He discusses the science of algorithm, control theory and model based design.
Military Drones
The below video explains both the present and future of science and technology behind military unmanned aerial vehicles such as the Predator and the Reaper.
Two medium-sized military drones which are currently in use are the in are the MQ-1B Predator and the MQ-9 Reaper. These were widely used in Afghanistan and Pakistan.
Personally, I am much more interested and fascinated in the drone technology and its uses in everyday life to assist different businesses, professions and for the hobbyist. Up to a few years ago, quite a big of the technology from military drones made their way into the consumer and business drones.
In the past 2 years, we have seen massive investment in drones especially in the business and consumer drone sector. Drone technology and innovation are really leaped forwarded in the past 2 years.
4. Intel RealSense modules are available from electronic distributors. They use time-of-flight technology to provide 3D images.
Intel’s own Falcon 8+ optocoupler (Fig. 5), equipped with a high-precision GPS system, features redundancy and safety. It also leverages a triple-redundant autopilot technology called AscTec Trinity, which was developed by Ascending Technologies (now part of Intel). The Falcon 8+ is available now, unlike technology such as the Shooting Stars, which is currently a research platform.
5. The Falcon 8+ developed by Intel can continue to fly even if one propeller stops functioning. The optocoupler also features a redundant battery system.
In fact, much of the technology presented thus far is either research or end-user technology or services, but Intel offers much more in this space for developers. For instance, the Intel Aero Compute Board(Fig. 6), an open-source platform for building drones, is designed to support a range of sensors including the firm’s RealSense technology in addition to wireless plug-ins. The board is based on a quad-core, Atom x7-Z8750 processor with 4 GB of LPDDR3, 32 GB of eMMC flash, and a dual-band Wiresless-AC 8260 with 802.11ac support using a 2×2 MIMO configuration. It includes MIPI CSI-2 camera interfaces. 6. The Intel Aero Compute Board is an open-source platform for building drones.
The board can be used in projects ranging from drones to robotics. It’s also found in the Intel Aero Ready to Fly Drone (Fig. 7). The package features a ground station controller.
The open-source system runs Linux and the flight controller is preprogrammed with Dronecode PX4 from the Dronecode project and the PX4 project. PX4 autopilot is the core of the Dronecode project—it can be used in unmanned aerial vehicles (UAVs) as well as unmanned ground vehicles (UGVs). I suspect it may be usable in unmanned surface vehicles (USVs) and unmanned underwater vehicles (UUVs), too. 7. The Intel Aero Ready to Fly Drone is a quadcopter that integrates the Intel Aero Compute Board and a RealSense sensor.
Developers can also take advantage of the AirMap SDK. The SDK consist of a number of modules and interfaces, including the Pilot API, the Status API that supports geofencing, and the Flight API. The Flight API will support the Digital Notice and Awareness System (D-NAS). The system is being set up to address the FAA Modernization and Reform Act of 2012, which states drone operators have to give notice when flying within five miles of an airport. The SDK also has an iOS and Android component to interactively access airspace data.
Much of Intel’s endeavors in this area are open source or supporting open-source projects like Dronecode. Quite a bit of technology remains proprietary as well, some of which is done in conjunction with partners. Figuring out what’s available can be a challenge, but it may save a significant amount of development effort.
X . IIIIIIII Qualcomm’s latest technology allows drones to learn about their environment as they fly
Amazon patent filing provides a peek at shrouded delivery drone designs
A newly published patent application almost literally delves into the nuts and bolts of the package-delivering drones that Amazon is developing – but it also makes clear that the look of the drones could vary, depending on where and how they’re being used.
The proposed designs include quadcopters and octocopters, drones with motors as wide as 18 inches that are mounted vertically to push the craft and its cargo through the air, and drones with fixed wings that extend well beyond the craft’s protective shroud.
That safety shroud is the common thread in all of the described designs.
The application was filed in December 2014 by Gur Kimchi and Rick Welsh, two of the lead engineers for Amazon Prime Air, but published by the U.S. Patent and Trademark Office only last week.
Amazon’s plans have moved much further forward over the past year and a half, as illustrated by last November’s revelations about one of the company’s drone prototypes. Nevertheless, the latest publication adds to the store of publicly available information about Amazon’s plans.
Amazon declined to comment on the application.
Previously released applications have described how Amazon’s drones could recharge themselves on docking stations that would be installed on streetlights, power poles and other potential perches, and how the drones could home in on the GPS coordinates sent from a customer’s smartphone.
The newly released filing focuses on the drones themselves: The craft’s vertical propellers are shrouded in a molded structure that’s designed to keep them from doing harm or sustaining serious damage, even if the drone were to crash into something. The structure could incorporate an antenna that receives and transmits data via wi-fi, near field communication, cellular networks or satellite links.
The navigation system could take its cues from GPS, an indoor positioning system or an inertial measurement unit. There’d be a motorized system to pick up and drop off payloads, but the application doesn’t describe that system in depth. This configuration for a delivery drone shows a wide fixed wing as well as two “pushing” motors mounted on the sides of the drone’s shroud. (Credit: Amazon via USPTO)Like the design shown in last November’s reveal, the drones described in the patent application have vertically mounted “pushing” motors as well as the horizontally mounted “lifting motors.” The filing also covers a configuration with a fixed wing for aerodynamic lift.
Amazon has been working on its drone delivery system for years, with the aim of setting up the infrastructure to deliver packages weighing 5 pounds or less to customers by air in a half-hour or less.
In the United States, such a system would require the regulatory go-ahead from the Federal Aviation Administration – a go-ahead that would have to go beyond the limits laid out in the FAA’s recently issued rules for commercial drones.
In the meantime, Amazon has been testing its drones on privately owned U.S. land, as well as in Canada, Britain, the Netherlands and potentially other undisclosed locales.
X . IIIIIIIII Micro Drone
What's inside of a hand-sized micro drone?
Drones are cheaper and more popular than ever! They are sold everywhere from Walmart to Amazon, ranging from thousands of dollars to as little as $10.
In this Teardown Tuesday, we are going to take a look at a relatively inexpensive micro-sized drone that fits in the palm of your hand.
Some drones are packed with GPS, cameras, and barometers. The drone in this teardown is a relatively basic one that is primarily designed for indoor use (due to its size). It's a Cheerson CX-10 and it was purchased for around $14 USD.
The micro drone
To open this drone, four small Phillips head screws needed to be removed. The plastic shell of the drone was also clipped together.
The small screws holding the drone together
Circuit Board
The top of the electronics
In this drone, the PCB also acts as part of its structure.
The board is two layers with surface mounted components on each. There is blue solder mask on both sides of the PCB and white silkscreen on the bottom of the board. The board is entirely comprised of surface mount components. The wires from the four small DC motors and the single cell lithium battery appear to be hand-soldered.
The bottom of the electronics
Microcontroller
The Cortex-M0 microcontroller
The brain of this drone is an STMicroelectronic STM32F031K4 ARM Cortex-M0-based microcontroller in a 5x5 mm UFQFPN 32-pin package. This microcontroller has a max clock speed of 48Mhz, 32KB of program memory, and supports a variety of communication protocols such as I²C, SPI, and UART.
Radio
The 2.4Ghz transceiver
In order to receive data from the handheld radio transmitter, a receiver is used. This is a 2.4GHz transceiver part number XN297. This transceiver communicates to the microcontroller through an SPI bus. The XN297 appears to be a clone of Nordic Semiconductor’s popular nRF24L01 2.4GHz transceiver. On the back side of the PCB, there is a trace antenna.
The trace antenna
Sensors
The gyroscope and accelerometer
To ensure that the drone is stable and easy to fly, an accelerometer and gyroscope are used. This drone uses an Invensense MPU-6052C that contains a 3-axis gyroscope and a 3-axis accelerometer in a single package. This sensor communicates to the ST microcontroller through I2C bus.
Battery
The li-ion battery
In order to give this drone a few minutes of fight time (around 5 minutes per charge), a small single cell Li-Ion battery is used.
The battery used in this drone has a nominal voltage of 3.7v and a listed capacity of 100mAh, giving it 0.37 W/hr of energy storage. This battery is manufactured by Shida Battery Technology Co., Ltd. and, based on dimensions, appears to be part SDL701717P. This battery measures approximately 17mm x 17mm x 7mm.
Additionally, this battery contains a small protection circuit board to prevent over-discharge. To provide stable voltage to the drone, a low drop voltage regulator is used—part LN1134, manufactured by Shanghai Natlinear Electronics Co. This regulator, in an SOT23-5 package, can provide 300mA at 3.0V.
The 3.0V LDO regulator
Wrapping it up
At around $14, this drone is packed full of a lot of electronics. If similar parts were sourced and assembled domestically (even in quantity), the profit margin on this product would be nonexistent. These drones are most likely made in quantities of 10 or 100 thousand in order to be sold at such a low price.
Only a few years ago, similar small and simple RC helicopters were selling for $35. It will be interesting to see the future of toys as the cost of electronics decreases.
X . IIIIIIIII The Biological UAV, A Drone Made of Materials Designed to Melt Into the Environment After Crashing
Stumble
Biologist Lynn J. Rothschild at the NASA Ames Research Center in Northern California is developing a biological UAV, a drone designed to fly to remote areas and simply melt back into the environment once it has touched down. The early prototype of the craft is built out of mycelium, a sort of lightweight fungal material sold by Ecovative Design as an alternative to styrofoam packing peanuts.
Gimball, A Drone With a Rotating Protective Cage Designed to Help Locate People After a Disaster
Stumble Gimball is a drone designed by Swiss robotics startup Flyability that is built with a rotating collision-tolerant cage to help protect its inner workings in high-risk areas, such as search and rescue missions after a disaster. The UAV, which features a built-in gyroscope to help it stay right side up even as the cage rotates,
X . IIIIIIII FPV for Beginners – a quick DIY quadcopter project
FPV (First Person View) is the term used to describe a ground level view of what the camera on your quadcopter is seeing. Current systems use various monitors to accomplish this, including:
1. Small LCD screens – sometimes built into the TX, other times mounted above it. (see pic) 2. Goggles – popular models include the Fatshark and the new Epson Moverio – in the near future, the Occulus Rift will likely be an important addition to this category. 3. Smart Phone or tablet screen – existing products such as the Phantom 2 Vision+ and the Parrot AR Drone use IOS or Android devices to display the camera output from the flying drone.
In this article we will put together a simple FPV system which could be installed on any quadcopter with enough payload to carry the weight. The very Basics
Most modern quadcopters are controlled with an R/C radio that uses the 2.4GHZ frequency band. Therefore, this frequency cannot be used for a companion FPV system since it may interfere with your R/C radio control. FPV systems are typically sold in the 5.8GHZ frequency band, although you can also get other frequencies.
In this intermediate level exercise, we’ll put together a very basic 5.8GHZ system. This system took less than one hour to assemble and test, making it an easy project for those who want to start working with some DIY aspects of the hobby.
Parts Needed
Parts list for basic 5.8 GHZ FPV using Mobius Camera or other Camera with Composite Video output
1. Mobius Sport Camera – with usb to video take-off. This cable is sometimes included with the Mobius when you purchase it. However, if it did not come with your Mobius, you can purchase it from this link.
2. Transmitter to beam the video signal from the Mobius from the air to the ground. I used a popular 5.8 GHZ 200 mw model called the TS351, sold by Boscam and various other vendors. Note: The Transmitter requires power – either from your existing quad battery or from an additional small battery which you can add. It has a range of voltage it can accept from 6.5-15V. ($25-$28) – Here is an Amazon link: Boscam FPV 5.8G 200mW AV Wireless Transmitter TS351
3. Monitor for use on the ground 4. Battery to power the monitor on the ground 5. Receiver for the Monitor on the ground to receive the video signal The three above are grouped together because you can get a single unit which performs all three functions. I used this one – however, there are other brands which have good reputations. ($150)
6. Misc solder, heat shrink, etc – and, to power the TX at the quadcopter, you’ll need a female connector to take power from the battery balance connector. If your battery is a typical 3s (Phantom, Blade 350, etc.), get an extension with this description – JST JST-XH 3S Balance Wire Extension.
Total cost for this small project, assuming you already have a Mobius or other camera (GoPro, etc.) with a composite video output, is less than $200.
NOTE: make sure you leave enough wire on the various harnesses to mount the camera and TX on your quad. You can zip tie or rubber band extra lengths of wire. Step #1 – DC power to the Transmitter
The 200mw transmitter comes with two wiring harnesses which plug into matching receptacles in the rear of the unit. One plug contains two wires – a red and a black. This is the power supply cable and needs to be wired to a DC power source of between 7 and 15 volts. Since the 3S batteries used in mid-sized quadcopters are approx. 12v, the existing battery provides an easy way to power the TX.
By connecting combinations of wires from the balance connector, you can obtain either 3.7, 7.4 or 11.1 volts – useful information both for this project and for your future needs. Most balance connectors use the following wire colors.
Voltages available for 3S Lipo Battery
The black wire is the negative or common – and the voltage is determined by which of the 3 others you connect to your circuit. In this case, we will use the red and the black in order to get the full 11.1+ volts.
Using the female of the JST-XH 3S Balance Wire Extension, cut all 4 wires a few inches down from the plug – then cut the yellow and blue wires shorter (these will not be used) and cap them off with a piece of heat shrink to avoid possible shorting. Strip the red and black wires and solder/heat shrink them to the red and black of the TX power supply wiring harness. You’ll have to cut the existing (red plastic) connector off first.
Plug the power supply into the TX and the other end into a 3s battery and the LED light on the TX circuit board will turn on.
The following is a picture of the battery balance connector (left) connection to an extension which then goes to the FPV transmitter voltage input (power in).
Balance Connector w/ Extension
Step #2 – Video out of the Camera into the TX
Cut off the RCA yellow connector from the Mobius Video-out harness and strip the wires further back. Another option would be to install the opposite RCA connector on the TX wires, but that will add some weight.
Inputs to FPV TX Module
The TX Video in plug contains 5 wires – you only need two of them – the yellow and the black. Twist and connect (solder and heat shrink) these with the matching yellow and black wires from the Mobius.
Video from Cam to TX Module
Step #3 – Test the setup
Test before mounting on your quadcopter – turn on the Mobius and plug in the usb video-out – power up the TX by plugging it into a 3s battery balance charger. Turn on the Monitor and scroll through the available receiver channels to find the one which the camera is connected to (you will see whatever the camera is pointing to).
Testing the Setup before Mounting on Quadcopter
Note that both the camera and the TX module have a number of exact frequencies which they can be set at – they must, of course, match. It may be that a specific combination is better for your choice of (optional) more advanced antennas or even that a certain combo works better in your flying area. You can experiment with different channels after you get the basic setup working. Step #4 – Mount on Quadcopter Use your favorite materials and mounts to secure the TX module and other wires so they will not get caught in the propeller blades and so that the antenna is able to be adjusted to various angles.
There you go! It’s as simple as that to get a basic FPV setup working. Depending on your exact setup and desired range you will likely have to do some tuning, experimentation and shielding. Cloverleaf antennas can be a great upgrade to the basic ones included with this kit.
The tuning and mounting will be very dependent on the exact Quadcopter model you are installing your FPV setup onto. I used a Blade 350 QX for my first flights and will likely try it on my Phantom 1 models soon. I’ll report back with any tweaks and comments after I get some additional time in the air.
Videos and pics below (more coming soon!) show the maiden flight in the backyard and a quick flight at the local school field. I took the rig to about 100 meters with a perfect picture still on the monitor.
Additional information
Various brackets and harnesses are available to mount your FPV monitor on top of your R/C Transmitter. One company makes a shoulder hung harness which allows the monitor to be closer to eye level and adjustable – completely separate from your R/C controller. I’m going to try several methods and will report back with my findings.
I used an older chest-mount strap I had as the basis for a monitor holder which would place the screen closer to my eyes. A picture of it is below.
Chest Mount Monitor Holder
The Mobius is fairly well behaved when using FPV – it will not turn itself off (to save energy) as it normally would if you are not actively taking pictures or videos. The FPV works well in video mode, although others have reported that latency (the speed difference between when the camera see something and you do) is much less if you use the 720p mode. Also, if you use the intervalometer (still photos every X seconds), you must set it on at least 5 seconds between each picture – I had mine set on 2 second with poor results…the pics come out fine, but the FPV monitor shows a lot of static and video interruptions. Update: I set the Mobius on 5 second intervals and I still get some static when it is taking the picture(s).
This article is just an introduction – there are literally thousands of posts online about using this camera and FPV if you want to delve further into an aspect of various setups.
Happy Flying!
Don’t want to do it yourself? There are now some full featured FPV quadcopters – all set up including Remote, Monitor, batteries, etc. – for as low as $300. One that we suggest is the Eachine 250 – check it out here.
This is a hobby grade machine – the really cheap “toy grade” FPV machines which sell for less are somewhat disposable – they use cheaper motors that burn out after a couple dozen flights, etc.
Moving on up
The setups above can produce some very decent video and still photographs. However, those who wish to move a couple steps up will get some or all of the following features.
1. Waypoint and/or Autonomous Flight – this allows your quadcopter to be programmed to follow a certain route before takeoff – for example, to fly around the perimeter of a property and take pictures of the building from all angles.
2. FPV/Monitoring – more expensive models allow you to see what you are filming – using googles, a monitor or a tablet/smartphone.
3. Camera Gimbal – The use of a gimbal allows you to control the camera angle from the ground and also stabilizes the camera so that it remains steady as the quadcopter turns and is buffeted by the wind.
4. Telemetry – allows you to always know exactly where the quadcopter is and other information such as battery life, etc.
As of this writing (May, 2014) a quadcopter with all of these features starts at about $2,000, which puts it out of the range of many beginning hobbyists. However, prices are coming down and capabilities are going up, so it’s likely that such a machine will soon be affordable to more consumers.
Keep in mind that the perfect quad for photography is often not the one you want for racing or even for FPV fun. The drones mentioned above are noted for their stability – something you don’t desire as much when you want to flip the machine and fly at high speed through the trees.
What is FPV?
Hobby FPV (which stands for First Person View) in its simplest form regards adding a small video camera and video transmitter to your model. Then, with a video receiver and a video display (video goggles, a video monitor, or both), the pilot/copilot can view the image from the model in real time, which gives the effect of "being in the cockpit." Please refer to the block diagram below. Note that typical RC equipment (RC receiver, radio, servos, etc.) are still required, but not shown.
X . IIIIIIIIII Setup Failsafe on Quadcopter – Flight Controller / Radio Receiver
It’s not the first time I heard someone had a quadcopter, lost radio signal, and it just flew away and never be found. This is why setting up failsafe properly is important when there is problem with your radio connection .
What triggers Failsafe?
There are many scenarios where failsafe can happen on a multirotor (if failsafe is supported and setup properly).
Radio is out of range.
Receiver gets disconnected from flight controller.
Receiver loses power or malfunctions.
Pilot accidentally switch off transmitter, or transmitter lost power.
When failsafe is triggered the following could happen, which are user determined.
All motors just stop spinning, and the vehicle drops out of sky like a stone.
Small amount of throttle (20%-30%), motors spinning slowly and ideally the vehicle descends smoothly to land.
Some RX/FC allows certain flight modes to kick in when failsafe happens, such as auto levelling, loiter or even return to home.
However, nothing will happen if quadcopter is already disarmed.
Setting up Failsafe and Testing
Between all the ideas of different failsafe behaviours, I prefer “shutting down all motors”. A quadcopter with uncontrolled spinning motors are extremely dangerous, it could end up going anywhere. it’s better to crash your quad and repair it later, then hurting someone on the ground.
Stopping all motors is a safer way to handle situation like radio signal lost, you have a lower chance of hitting someone as it should just crash vertically into the ground. Also in case of lost video signal, you can just switch off transmitter to emergency land your multirotor, preventing it from wondering around / ascending unexpectedly.
Find out how failsafe is setup on your radio receiver. Many receivers failsafe is setup when binding happens, some has a dedicated failsafe button. They remember transmitter throttle position when they are bind together, or when the failsafe button is pressed. That means when failsafe happens it defaults to output thatt throttle setting to your flight controller. Rebinding should reset the failsafe function.
Many Flight controllers also supports failsafe. It’s a good idea to setup failsafe on both FC and RX to have an extra layer of safety. In the next part I will describe how I setup failsafe on my gear, Naze32 and D4R-II.
Failsafe on Frsky D4R-II Receiver
I was told the Frsky D4R-II has two failsafe options.
User defined throttle on lost signal (however this will not be detected by FC, and will not trigger Failsafe on FC)
No pulses on lost signal (this is the same as unplugging the servo lead between RX and FC, this will trigger failsafe on FC)
If failsafe is not set/enabled, the default behaviour is to hold last position before signal was lost (Avoid! Dangerous!)
For options 1, It’s explained in the RX manual:
Bind the receiver first and turn on both the transmitter and receiver;
Move the controls to the desired failsafe position for all channels;
Held down the F/S button of the receiver (for a second). The GREEN LED of the receiver will flash twice, indicating the failsafe position has been set in the receiver.
To disable/reset the failsafe function, re-bind the receiver.
For reference, here is how option 2 is done. If you want to send no pulses, you can bind transmitter and receiver, turn off the transmitter, and power cycle the RX (switch off and on again), and finally press the F/S button. This will trigger failsafe on Baseflight/Cleanflight (if failsafe feature is enabled).
Setup Failsafe on Naze32
The Naze32 has a built-in failsafe that can be set via the Command Line Interface (CLI) in the Chrome configurator App. With FS enabled in Flight controller, it ensures the aircraft behaves exactly what we want in case of RX failsafe fails, such as connection cable unplugged or RX powered down.
First enable Failsafe feature:
feature failsafe
These are some basic example commands:
set failsafe_delay = 10
set failsafe_throttle = 1000
“Failsafe_delay” means when failsafe is detected, it will kick in after a delay of 1 second (10 x 0.1 second), with throttle value of 1000. You should change “failsafe_throttle” to a value lower than your min throttle setting and the motors will stop in a failsafe situation. So if your “min_throttle= 1150” then “set failsafe_throttle= 1100” or below will ensure they stop.
Note that after FC failsafe, you won’t be able to arm the board, unless you power cycle the FC. However if it was just a RX failsafe you can (if FC didn’t detect it).
X . IIIIIIIIIIII Redundant stabilization systems for drones
Among the many advantages that have always contributed to the worldwide reputation of MikroKopter are the unequalled reliability and robustness of this "high-flying" electronics.
Users who have had the opportunity to try something else know well the sense of security that a pilot has when flying a MikroKopterhen flying a MikroKopter, because every day it starts and reacts in the same way to pilot's input. Someone that flies a MikroKopter has always that reassuring feeling to remain the “master” of the aircraft in any situation, which is far from being the case with Asian imitations.
Because security and reliability have always been on the top of the agenda of the German manufacturer, and to push the limits even further, MikroKopter has developed a redundancy system.
More specifically, this consists in duplicating the critical elements of the drone, so that if a problem occurs to one of them, the standby system takes over allowing the pilot to bring the aircraft smoothly to the ground and land.
What are the critical elements that must be redundant to compensate for a possible failure on a multirotor?
Very logically this concerns the following devices:
motor propulsion units: speed controller + motor + propeller
battery
the central unit in charge of the flight management and stabilization: the Flight-Ctrl
The motor propulsion units: To ensure redundancy in propulsion, it is essential to have at least one multirotor with eight engines / propellers (as configurations with 6 or 4 engines are not able to sustain in the air if one engine came to fail).
The battery: Two batteries are required and must be connected in parallel. In this way, if one of them had to give up, the second could continue to provide enough current to allow an emergency landing
The central unit, in charge of the flight management and stabilization: A second Flight-Ctrl is installed as backup and will automatically take over, if the main Flight-Ctrl could fail.
As usually, the German manufacturer is the first on the market to implement this redundancy in is flight-control system for UAV's
This setup is based on an Okto powerboard (foreseen for eight engines), that has a duplicated data bus between the speed controllers and the 2 redundant Flight-Ctrl's and two battery connections so it can be powered by two LiPo's in parallel (see diagram below).
The powerboard is available in two versions: the Okto-XL for engines with up to 30A per motor consumption and Okto-Ultra version for larger configurations.
Packing Including : 1* F550 Hexa-Rotor Air Frame Flamewheel Kit 6*A2212 1000kv Brushless Outrunner Motor W/ Mount 6*30a Brushless Esc 3*10×4.5 3k Carbon Fiber Propeller Cw Ccw 1045 1045r Cf Props Blade 1*Radiolink T8FB 8CH 2.4g Radio Control System Transmitter and R8EH Receiver 1*Kkmulticopter V2.3 Circuit Board Flight Controller V5.5
Blackmagic's drone-friendly Micro Cinema Camera ups the ante for aerial video
Blackmagic Micro Cinema Camera - light enough to fly on a compact quadcopter, but with an unprecedented level of camera control
Blackmagic Design has just announced yet another disruptive pro video product – the US$995 Micro Cinema Camera. Weighing just 10 ounces (300 grams), the BMCC is designed to be a GoPro killer action camera that puts an unprecedented level of control into a package small enough to be carried by a compact quadcopter. Here's a drone camera that will let you mount your choice of micro 4/3rds lenses, and control everything from focus to iris and even zoom from your remote control. Plus it will record everything in uncompressed CinemaDNG raw video for extreme editability in post production. The world of drone videography just got a lot richer.
Blackmagic has been a disruptive force in the pro video market since the launch of its first Cinema Camera back in 2012. Now, the Australian-based company is setting its sights on action and drone videography with the announcement of the Micro Cinema Camera (BMCC), set to hit the market in June.
Smaller than the Pocket Cinema Camera, the BMCC is clearly intended to be a GoPro killer for video and film professionals. It weighs in at just 10.65 ounces (301 grams), which is about 3 times the weight of a GoPro Hero 4, but it should scrape in just under the payload limit for a DJI Phantom 2 quadcopter.
It may not shoot 4K vision like the top-end GoPro cameras, but it can output uncompressed CinemaDNG raw video at 1080p, opening up superb post production capabilities, or it can downscale to the highly editable Apple ProRes formats to save space on your SD card. Dynamic range is an impressive 13 stops, meaning plenty of detail is preserved in the shadow and highlight areas of the picture that can be brought out in post.
Unlike its action camera competition, the BMCC has an active micro 4/3rds lens mount, so you've got access to a vast range of excellent glass, and even more if you use an adapter. And there's nothing on the market that's more expandable. S.Bus and PWM pins on the expansion port let you set up remote or wired camera controls for total flexibility so you can build a setup that allows you to control everything from exposure to focus and even zoom from a remote location. A stabilized drone camera with a remotely controlled zoom lens on it? Scary stuff.
It's very much a pro video tool. If you want to mount the BMCC on a drone, you'll have to bring your own lenses, stabilizing gimbal, wireless video transmitter, external monitor, and you'll have to work out how to get your camera control signals through to the camera itself through the expansion port. On the other hand, it runs on Canon LP-E6 batteries common to DSLRs, and it mounts to anything with a standard 1/4" camera thread, with mount points on the top and bottom of the camera.
Blackmagic is positioning the BMCC not only as a drone camera, but as a do-it-all action cam that can strap onto helmets, into cars and into hidden camera setups. Certainly the most exciting set of possibilities here is for stunning aerial footage though, with an unprecedented level of control in such a compact package – you won't need giant, heavy octocopters carrying massive cinema or DSLR cameras to capture pro-level aerial footage any more. And knowing how quickly Blackmagic tends to iterate, surely it won't be long until we see an upgraded version that handles 4K video and higher framerates. Very cool technology!
X . IIIIIIIIIIIII The Future of Drones: Breaking Down The Stack
Drones have already emerged as major players in our society, but much is still uncertain. Here's a look at the infrastructure, services, and hardware that will be shaping the future.
I’ve been studying the drone ecosystem in-depth for more than a year, initially resulting in the Future of Frontier Tech report I wrote at CB Insights.
Today, as an investor at Rothenberg Ventures, I’ve continued to dig deeper in an effort to identify the key opportunities emerging within each part of the drone stack.
As a team at Rothenberg Ventures, we’re continually honing our thoughts and speaking with experts across all areas of Frontier Tech. We operate with key beliefs across each sector that allow us to establish a baseline framework for evaluating the thousands of companies we see each year.
Our conviction for the drone ecosystem began in early 2014 when we seeded the drone operator marketplace, Dronebase, and continued with multiple investments in our most recent River class.
As we continue to invest in drone startups, we are developing multiple core beliefs surrounding drone infrastructure, services, hardware, and more. Some of them may change over time, but we thought it would be helpful to share our thoughts in the interest of collaboration within the drone ecosystem.
See below for a detailed breakdown.
Regulation & Infrastructure
Click for larger. via AirmapAround 1 million drones were expected to be sold this past holiday season. With increased consumer adoption, Section 333 exemption issuances, and more regulation expected by Q3’16, we will need to manage sub-400 feet airspace. In speaking with industry and legal experts we’ve learned that a lot of this airspace will be managed with both a vertical and horizontal approach.
Municipalities will largely be in control of the airspace with the FAA having a horizontal set of rules and control as a governing body across the United States. A software layer will manage this. Applications we’re interested in funding:
Air Traffic Control (ATC) & Fleet Management: We expect Beyond Visual Line of Sight (BVLOS) restrictions to gradually change over the next few years. Tech giants such as Google and Amazon have made their delivery aspirations clear, however, there will be multiple public and private entities operating fleets of drones across dozens of use-cases. As with any asset-heavy model, these drone companies will eventually reach a point where they must manage and observe their fleet’s activity in real-time. We are interested in funding startups that are the fleet management layer of the drone software stack.
Drone detection and defense: A proliferation of drones will inevitably lead to uninformed fliers in addition to bad actors. We’ve already seen attempted drone deliveries into prisons, near-misses with airplanes, crash landings at the White House, and more. The ability to identify and control rogue drones is critical moving forward. While some of this may be handled by ATC and fly/no fly information providers (like Airmap) at the hardware level, bad actors will always be able to remain off the grid to a certain extent. We’ve learned about the various potential workarounds for many of these systems, but that is no reason to not defend against the 99% of drone operators.
Hardware
Hardware is becoming a commodity with well-capitalized, innovative players such as DJI, Parrot, 3D Robotics, Yuneec, and others dominating standard quadcopter hardware (and even expanding into vertically-focused drones in some instances). Because of this, we believe that enterprise drone hardware will serve as “platforms” for payloads and other enabling technologies. On the consumer side, we believe that drones are one of the next camera platforms. Applications we’re interested in funding:
Unique form factor: We are interested in drone manufacturers with a unique form factor (like Vantage Robotics, Ascent Aerosystems orFlyability) as well as startups innovating on existing hardware platforms for specific use-cases. This includes startups working on endurance technology, tethered drones, as well as increased payload solutions.
Fixed wing & hybrid drones: Few players have attacked the consumer fixed wing market. The endurance afforded by fixed wing drones could prove that form factor superior for some enterprise use-cases, including long-distance logistics and surveying, as well as “macroscopic” monitoring. We also are continually tracking innovations in the hybrid form factor of fixed-wing with VTOL capabilities (like XCraft).
Drone Services
The enterprise appeal for drone services tackles multiple billion-dollar sectors. Within construction, precision agriculture, oil & gas, and more, drones pose massive increases in efficiencies as well as decreases in costs. There will be a new wave of private and public players entering the drone services segment over the next 2–4 years, and we are already seeing that ramp up, speaking with an average of 1 new drone services company per week over the past few months. Applications we’re interested in funding:
Vertically focused insights: Gathering data via drone, whether it’s agricultural heat maps or volumetric data of a quarry, is just step 1 of the services model. We’d like to fund teams that have deep expertise in their vertical with the ability to gather data and then provide easy to process, actionable insights on top of that data. With a vertical focus, services companies can build a data moat that creates a type of network effect across all of the company’s customers.
Data Analytics: Eventually we envision a world where most companies in an applicable industry, whether large or small, will own a drone. We’re actively looking at “last-mile” analytics companies that can take a wide range of datasets and provide insights to their customers, whether that is a small farmer willing to pay per acre surveyed, or a larger construction company paying on a per site recurring basis. The key is to be able to say “this is what is happening, and this is what you should do to improve your process.”
Full Stack Services: Companies that can provide a full-stack solution today will provide specialized hardware to software to insights (Kespry). If your stack includes specific technological IP related to an area (such as a sense and avoid tech that specifically targets wind turbine monitoring a la SkySpecs) this will help prove out your vertical approach and will show a key understanding of how you build better processes to scale within a specific vertical.
Logistics: This is a huge market that will not be solved only by large incumbents.
Enabling Technology
There is a lot of enabling technology that will be sold direct to OEMs and service providers. We are very interested in the ability to “level up” a drone across autonomy, data collection, and usage, thus these enabling technologies will be valuable. Applications we’re interested in funding:
Collision avoidance/sense & avoid: Improving autonomy for drones is a necessity. The thesis is simple: As more drones populate our skies, fleet management and ATC will play a key role, however on-board obstacle avoidance will also be a key driver in enabling fleets of drones. The industry today is split on whether to go entirely on-board (Amazon) versus every drone reporting to a central operator (Google). It is most likely that a hybrid form of both technologies is what will ultimately happen. For consumers, sense and avoid is incredibly important as follow-me drones like Lily begin to ship. We would not be surprised if multiple drone owners express disappointment once their new $900+ piece of equipment breaks because it was “flying blind” and crashed. We want to invest in companies fixing that pain point, as well as those servicing the multiple enterprise use-cases for urban and suburban areas and getting close to a specific object.
Endurance infrastructure: Battery-powered drones with 20–45 minute flight time will continue to present operational bottlenecks. We want to invest in startups looking to solve these issues with solutions ranging from automated docking and charging (HiveUAV, Skyfront) to swarm collaboration and more. Disclosure: We are investors in HiveUAV, a company which combines drones and automated docking stations to help multiple industries monitor remote locations from the air via automated docking and charging stations called “Hives”.
Sensor development:Operators will continue to gather more data, thus we are interested in startups innovating on the sensor payload to enable unique datasets via drones (like Quanergy).
Operator Marketplaces & Training: Not all drone use-cases will need consistent usage, however they still will be immensely valuable on a contract basis. As I previously mentioned, we are investors in DroneBase, one of the world’s first drone operator marketplaces. We are firm believers that low-cost drone services will have a lasting market and we have seeded what we believe will be one of the key players in that segment of the market moving forward.
X . IIIIIIIIIIIIII Drone-RK: A Real-Time Distributed UAV Platform
Drone-RK is an open-source real-time distributed UAV development infrastructure from the Electrical and Computer Engineering Department at Carnegie Mellon University. This project focuses on the software infrastructure required for self-contained autonomous UAV application development. Drone-RK currently runs on the Parrot AR.Drone hardware platform. Drone-RK provides Resource Kernel (RK) extensions to the standard Linux kernel that provide real-time scheduling extensions such that tasks in the system can specify their resource demands such that the operating system can provide timely, guaranteed and controlled access to system resources (CPU, network, sensors and actuators). The Drone-RK development platform provides APIs for local sensing, control and processing as well as various demonstration applications. In order to support rich autonomous behaviors, the platform provides hooks to incorporate additional hardware components (GPS, digital compasses, ultrasonic ranging, etc.) using our custom hardware expansion module.
In order to support autonomy and easy integration of additional sensor, we have developed the Drone-RK hardware expansion module. It adds a low-speed long-range communication channel along with a GPS module and plenty of extra I/O.
The module has the following features:
ATmega128rfa1 Microcontroller
USB serial interface to the drone
802.15.4 Radio with power amplifier (1km line-of-sight range)
GPS chipset
Simplest Quadcopter Drone Circuit
X . IIIIIIIIIIIIIII Simplest Quadcopter Drone Circuit
Designing the Quadcopter
In this post we learn how to make a quadcopter or a drone quickly and cheaply using very ordinary components. In one of my earlier posts we learned how to make a relatively complex and therefore efficient quadcopter flying machine without using microcontroller
In the present article we try to make the above design much simpler by eliminating the brushless motors and replacing it with brushed motors, and consequently making it possible to get rid of the complex BLDC driver circuit module.
Since the mechanical construction details of the quadcopter was already discussed comprehensively in the earlier post, we will only deal with the circuit design section and learn how it may be built for flying the proposed simplest drone circuit.
As mentioned earlier this simple quadcopter requires only the basic RF remote control modules as shown in the below example image:
Apart from the above mentioned RF remotes modules 4 permanent magnet brushed motors will be also required which actually forms the heart of the drone machine. It could be as specified in the following image with the given descriptions, or any other similar as per the required user specifications: Electrical Specifications of the Motor:
12V = operating voltage 200mA = operating current 10,000 RPM
How to Configure the Remote Control Receiver with the Motors
Before understanding how to configure the remote control receiver with the quadcopter motors, it would be important to learn how the motor speeds are supposed to be adjusted or aligned for generating the required left, right, forward, backward motions.
Primarily there are two ways a quadcopter can be enabled to move, which are in the "+" and the "x"modes. In our design we employ the basic "+" mode of motion for our drone, as indicated in the following diagram:
Referring to the above diagram we realize that we simply need to appropriately increase the speeds of the relevant motors for executing the desired directional maneuvers on the drone.
This increase of speeds can be enforced by configuring the remote control relays as per the following wiring diagram. In the diagram below we can see an IC 555 PWM circuit wired with the 4 relays of the remote control receiver module of the 6 relays (1 relay being unused and could be simply removed to educe space and weight).
The PWM feed is connected with all the N/C contacts of the relays, which implies that normally the quadcopter would be hovering through this PWM feed whose duty cycle may be initially adjusted such that the quadcopter is able to attain a correct specified amount of thrust, and altitude.
This may be experimented by appropriately adjusting the shown PWM pot.
How to Configure the Relay Contacts
The N/O contacts of the relays can be seen wired directly with the positive supply, so whenever a relevant button is pressed on the remote transmitter handset, the corresponding relay is activated in the receiver module, which in turn enables the relevant motor to get the full 12V supply from the battery.
The above operation allows the activated motor to gain motor more speed than the rest of the motors which consequently allows the quadcopter to move towards the stipulated direction.As soon as the remote button is released, the drone stops instantly and continues to hover in the constant mode.
Identically, other directional motions can be simply achieved by pressing the other assigned buttons, on the remote handset.
The topmost relay is for ensuring a safe landing of the machine, this is done by adding a current dropping resistor in series with the N/O contact of the shown relay.
This resistor value must be calculated with some experimentation such that the quadcopter hovers around a couple of feet above the ground whenever this resistor is toggled through the attached relay.
The shown relays are the part of the RF module receiver, whose contacts are initially unconnected (blank by default) and needs to be wired as indicated in the above diagram.
The RF remote receiver is supposed to be installed inside the quadcopter and its relays wired with the relevant motors and battery as per the above shown layout.
How the Drone Moves:
As explained in the above discussion, when a particular remote button is pressed, it actuates the corresponding relay of the quadcopter module causing the relevant motor to move faster.
This operation in turn forces the machine to move in the direction opposite to the motor which is being switched to rotate at the faster RPM.
Thus for example, increasing the speed of the south motor causes the machine to move towards north, increasing the north motor causes it to move south, similarly increasing east motor speed causes it to move west and vice versa.
Interestingly, increasing the south/east motors enables the quadcopter to move towards the opposite north/west that is in the diagonal mode....and so on.
Pros and Cons of the above explained Simple Qaudcopter remote control circuit.
Pros
Cheap, and easy to build even by a relatively new hobbyist.
Does not require complex joystick operations.
Can be controlled using a single 6 channel remote control module
Cons
Less efficient in terms of battery back up due to the involvement of brushed motors
Directional speed is constant and cannot be varied through the remote control handset
Maneuvering may not be smooth rather a bit jerky while switching the buttons.
X . IIIIIIIIIIIIII Quadcopter Wiring Diagram Guide
If you making a quadcopter at home and have to bought a lot of parts including motors, props, flight controller, battery, camera, receiver, gogggles, transmitter etc. But do not know how to connect them and looking for help. You are coming the right place, here were collected quadcopter wiring diagram, may these drone wiring diagram guide can help you making a few of your own quadcopter a bit easier and you don’t need to ask someone or search over forums or blogs to troubleshoot your issue.
Tips: All below images can click to enlarge.
FPV quadcopter wiring diagram
Sample drone wiring diagram, this image is from droneflyers.com, Thank you.
Check above diagram, which show you a sample fpv quadcopter and some parts: transmitter, receiver, flight controller, FPV camera, FPV transmitter and antenna, FPV receiver and monitor or goggles.
Therefore, you have to frist solve the problem of what do you need for build a FPV drone? Below listed are the basic component of drone that you should purchase them before building it.
Frame *
Frame * 1
Flight controller * 1
Receiver * 1
Rransmitter * 1
Antenna * 1
Transmitter * 1
Camera * 1
Goggles or monitor * 1
Battery * 1
ESC * 4
Motors * 4
Propellers * 4
Others: charger / straps etc.
All the components are correlated and supplemented with each other to constitute an perfect drone
FPV quadcopter Wiring diagram basic
Drone wiring diagram detail
As you see above the base of drone Wiring diagram, there are so many components are need to connected with each others.
How to?
We can split the base drone wiring diagram into multiple parts as below:
Flight controller connection wiring diagram
OSD and Transmitter and camera and battery wiring diagram
Propeller rotation diagram
ESC and motor connection
OK, Let’s go the step by step process for below setting goals.
#1 Flight controller Naze32 connection diagram
Flight controller is most important one, I regard the flight controller as a brain which will stop flying when its components fail. Above as example is Naze 32 Revision 6 Flight Controller connection diagram.
The diagram above shows a fairly common setup on a FPV racing quadcopter using a CPPM receiver, optional GPS module, and an RGB LED bar.
#2 Micro OSD drone wiring diagram
The diagram above shows how you set up the entire system. There are several different options for how to do this, but we decided on the above in this case. We therefore connected the voltage, signal and ground cables from the camera to the transmitter, and also connected a balance lead connector in order to power the system.
#3 Quadcopter prop rotation diagram
This section is a relatively simple parts of drone, just follow it.
#4 ESC and motor connection diagram
#4 ESC and motor connection diagram
Connect ESC Deans connectors to Power Distribution Board Deans connectors. Connect three-wire cables from the ESCs to the PDB signal pins according to motor number. Connect the ESC for motor 1 to the PDB pins marked M1, motor 6’s ESC to the pins marked M6, etc.
====== MA THE ELECTRONIC DRONE FOR ROBO TECH ( El Ro Dr ) MATIC ======
.jpg)


 can correlate disparate data to cover everything from a college campus to very covert missions.")












 No Fly Zone Drone Technology
No Fly Zone Drone Technology

 The below video explains both the present and future of science and technology behind military unmanned aerial vehicles such as the Predator and the Reaper.
The below video explains both the present and future of science and technology behind military unmanned aerial vehicles such as the Predator and the Reaper.



 Drone on Intel’s Platform
Drone on Intel’s Platform 




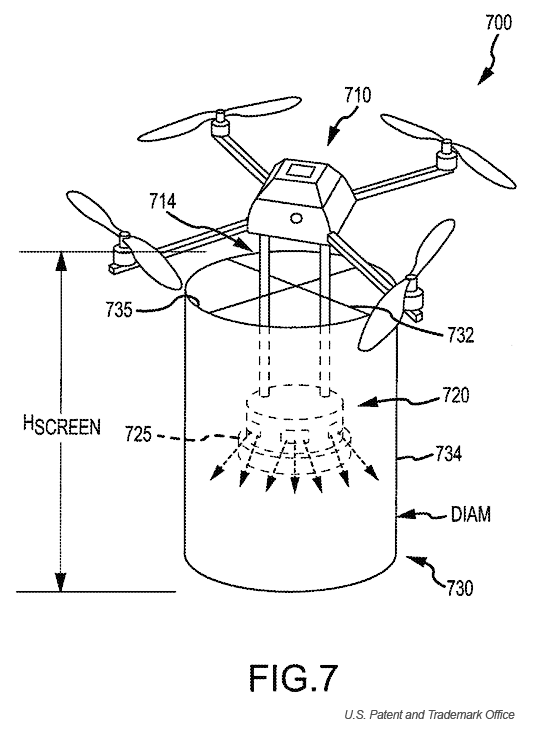












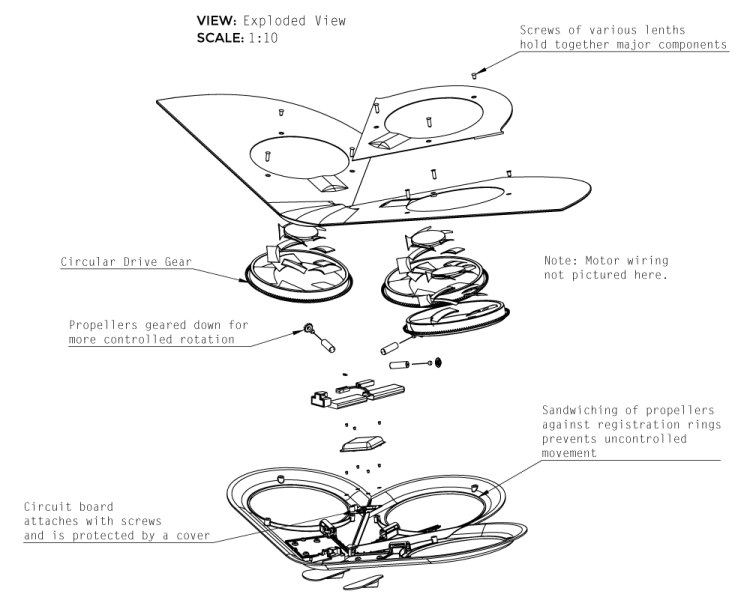
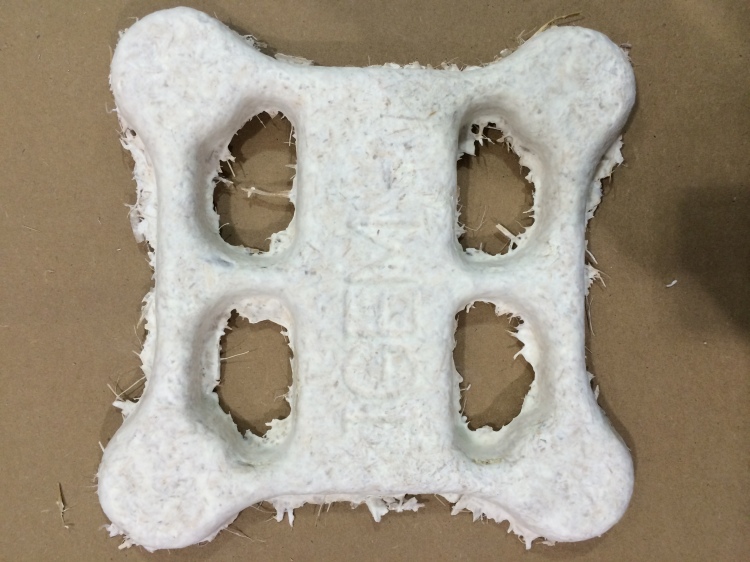
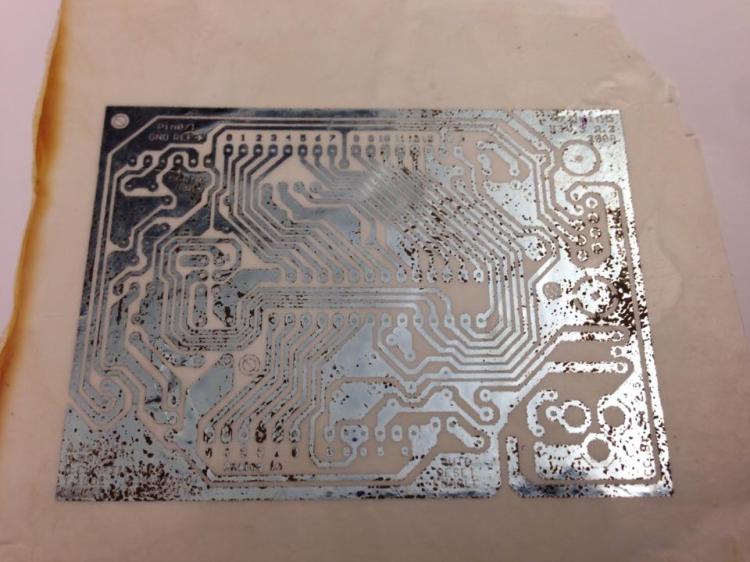







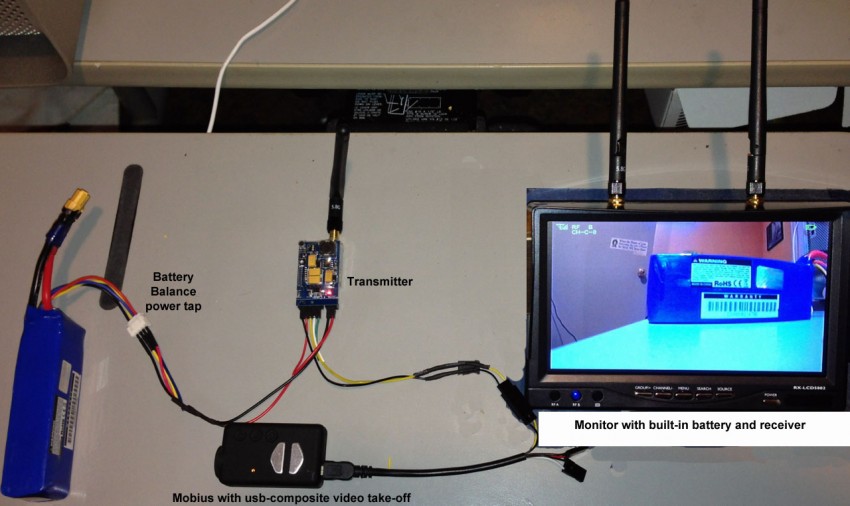
 Use your favorite materials and mounts to secure the TX module and other wires so they will not get caught in the propeller blades and so that the antenna is able to be adjusted to various angles.
Use your favorite materials and mounts to secure the TX module and other wires so they will not get caught in the propeller blades and so that the antenna is able to be adjusted to various angles.




























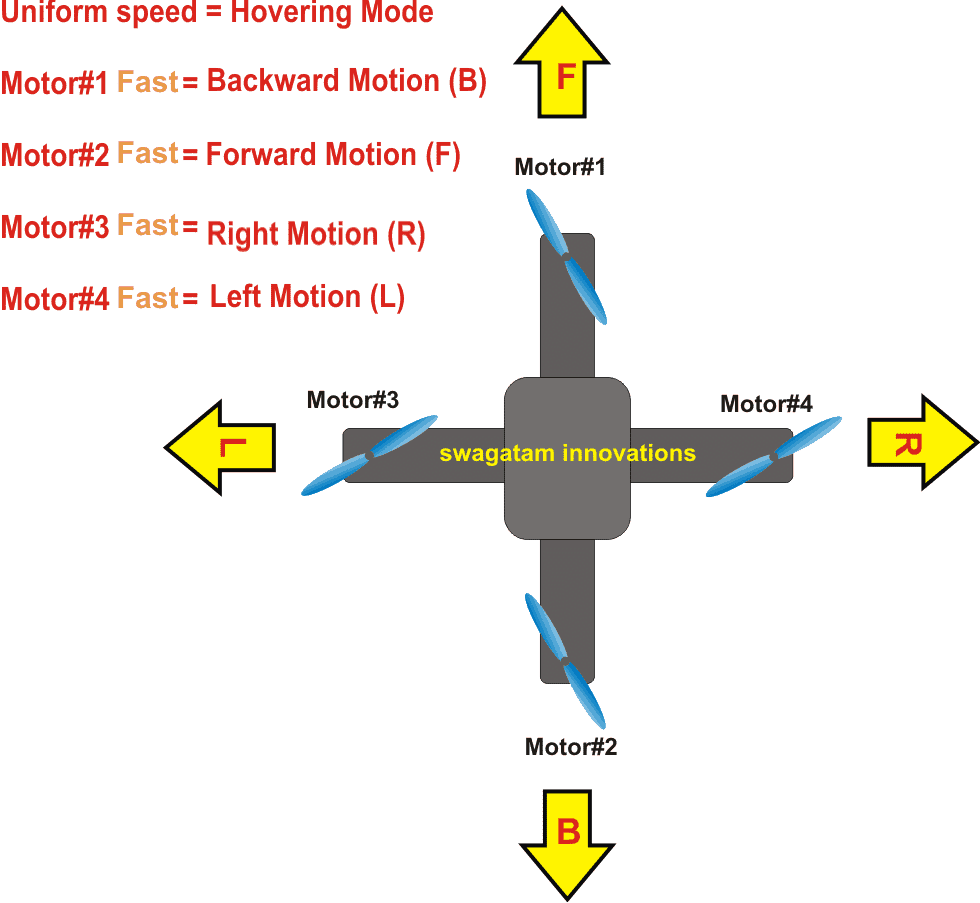
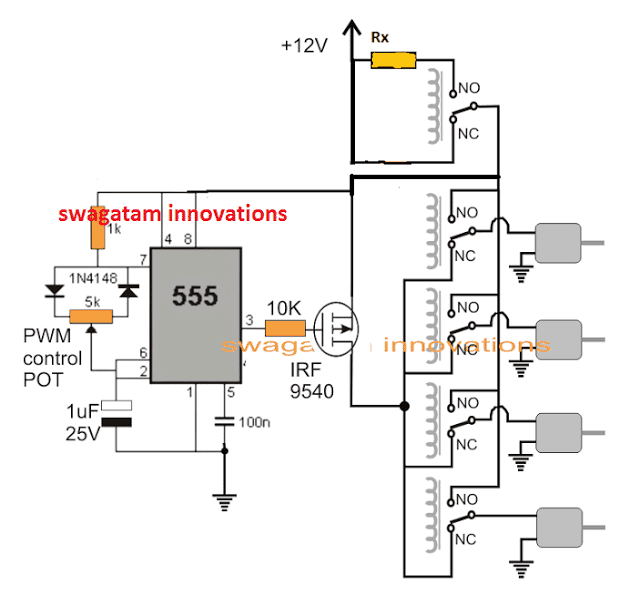


 If you making a quadcopter at home and have to bought a lot of parts including motors, props, flight controller, battery, camera, receiver, gogggles, transmitter etc. But do not know how to connect them and looking for help. You are coming the right place, here were collected quadcopter wiring diagram, may these drone wiring diagram guide can help you making a few of your own quadcopter a bit easier and you don’t need to ask someone or search over forums or blogs to troubleshoot your issue.
If you making a quadcopter at home and have to bought a lot of parts including motors, props, flight controller, battery, camera, receiver, gogggles, transmitter etc. But do not know how to connect them and looking for help. You are coming the right place, here were collected quadcopter wiring diagram, may these drone wiring diagram guide can help you making a few of your own quadcopter a bit easier and you don’t need to ask someone or search over forums or blogs to troubleshoot your issue.






Fabulous Post! Thank you for sharing such an informative blog with us. To know about Drone Software Canada ,visit our website.
BalasHapus