
In a work system and display of electronic equipment both for commercial and defense electronics then a qualified electronic system must go through the work process system as follows:
1. through the stage of making a control system or
we usually call control units. control unit can
is an analog control (transistor, IC and diode).
digital control (logic IC also IC Timer), electro control
mechanics that is using (relay, contactor as well
timer)
2. Through the stage of making the main unit or business system
and work done, usually playing units can be
working circuit indicator lights on the panel or work
motors both AC, DC, servo motors and stepper motors.
3. Through the Stage of making Actuator units, on this system
will be displayed in the form of audio signal display, signal
video and control signals that can be displayed in space
monitoring control both at the earth station and at the station
outer space .
Thus the working system of an instrumentation and control that exists in the 21st and 22nd centuries is likely to develop in the process of purifying materials for qualified electronic component components so that they can occupy the main unit position, control unit, actuator unit and fast, precise unit settings. accurate towards a century that occupies many broad fields of planets and stars.
1. through the stage of making a control system or
we usually call control units. control unit can
is an analog control (transistor, IC and diode).
digital control (logic IC also IC Timer), electro control
mechanics that is using (relay, contactor as well
timer)
2. Through the stage of making the main unit or business system
and work done, usually playing units can be
working circuit indicator lights on the panel or work
motors both AC, DC, servo motors and stepper motors.
3. Through the Stage of making Actuator units, on this system
will be displayed in the form of audio signal display, signal
video and control signals that can be displayed in space
monitoring control both at the earth station and at the station
outer space .
Thus the working system of an instrumentation and control that exists in the 21st and 22nd centuries is likely to develop in the process of purifying materials for qualified electronic component components so that they can occupy the main unit position, control unit, actuator unit and fast, precise unit settings. accurate towards a century that occupies many broad fields of planets and stars.
LOVE IN LIGHTING FOR e-WET Count

JESIISE The corridor of Gen Mac Tech Zone UNIT Count
The ability of the control unit is usually a DC (direct currents) supply ability to control and measure the power of a relay system so that it can supply sinusoidal sensors and transducers work automatically through relay contact contacts such as coil relays, optical relays, CPU relays and relay cells from Logic Fuzzy and Artificial intelligence. while the unit actuator requires a power supply process for large enough circuits, especially AC motors (sinusoidal) which many uses, especially for driving lifts, stairs running on hyper mart or multi - storey buildings, also on machine machines in the industry, the power used can be 1 phase also 3 phases or 2 - 3 phases both parallel and in series so that an elevator system works, also for aircraft jet engine engines and long-range cruise missiles in intercontinental missile warfare. control capabilities can be analog, digital, electro mechanics or all three mixtures. power system in moving the main unit, control unit, actuator unit and power unit can be analyzed by the technique of power request management on every electronic energy that exists both permanently and wirelessly in the power supply technique.

Analog I/O basic knowledge
_________________________________________________________________________________
basic knowledge related to analog I/O, A/D conversion, and D/A conversion in an easy-to-understand way that includes illustrations. The content offered here is recommended knowledge for anyone looking to perform measurement control using a computer as well as anyone considering automating data logging or measurements.
What is analog I/O?
The signals from sensors that measure surrounding natural factors such as temperature, pressure, and flow rate are often analog signals, and most control actuators move according to analog signals. On the other hand, only digital signals can be handled by computers. For this reason, in order to input a signal from a sensor using a computer, or to output a signal to an actuator, it's necessary to have a device that can bridge the analog signal and the digital signal handled by the computer. That bridge is called an analog I/O interface.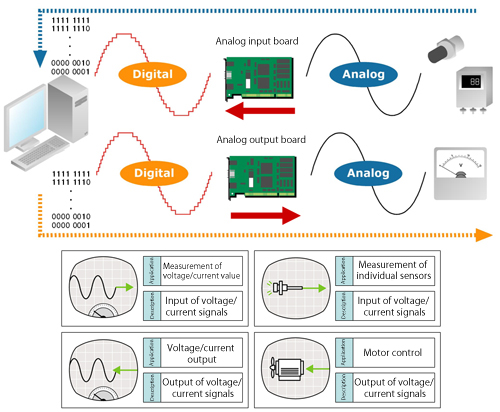
Analog I/O device classification
Analog input device(A/D conversion)
This device is responsible for converting analog signals from external devices to digital signals that can be processed by a computer.Analog output device(D/A conversion)
This device converts the digital data from a computer to an analog signal before outputting that signal to an external device.Analog I/O device(A/D, D/A conversion)
Analog I/O devices are devices with both an A/D conversion function and a D/A conversion function.Analog to digital, digital to analog.
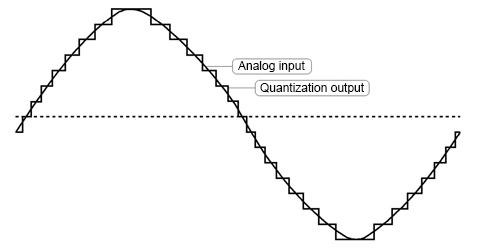
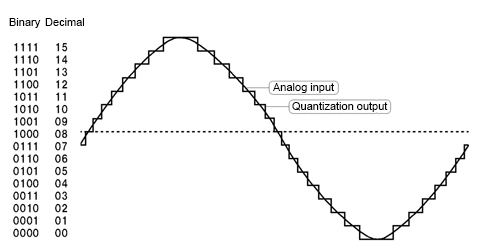
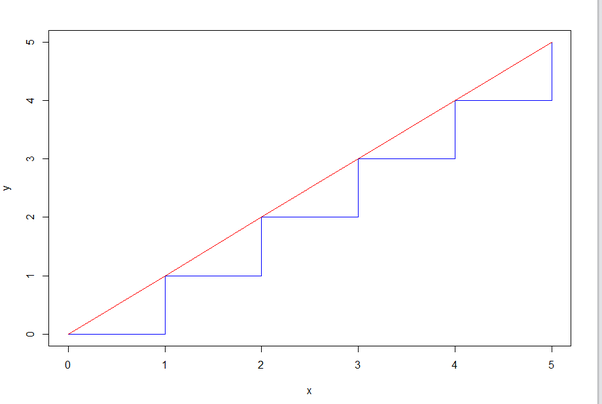
When inputting an external analog quantity into a computer, in order to display the quantity properly digitally, an infinite number of digits is need for the corresponding digital quantity. This is not possible with a computer capable of handling only a limited number of digits, even from the viewpoint of the circuit technology that makes up the converter.The most effective way to solve this problem is to keep the number of digits within the acceptable range by rounding or using either the floor or the ceiling. In other words, this means replacing an amount within a certain range with a representative value. This is referred to as quantization.
When quantizing analog values represented by a solid line, you get a stepped line. This makes it possible to express any analog signal using a finite value. This technology is active in things many people are familiar with, for example, in cellular phones. Cell phones make calls by converting voices (analog) to digital sounds.
Analog I/O device isolation types
Analog I/O devices can be broadly classified into two categories: isolated and non-isolated. Let's look at the features of two types of isolation. Note that non-isolated types do not employ an isolation element.Bus isolation
Using a photocoupler, the computer and external I/O circuits are isolated. Because it's possible to prevent electrical interference from being introduced, this method allows for worry-free usability even if noise is easily generated in the wiring or if there is a concern of the computer malfunctioning or becoming damaged.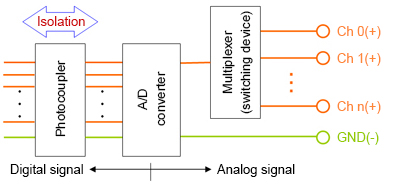
Independent (channel-to-channel) isolation
In addition to bus isolation, independent isolation uses a photocoupler and an isolation amplifier to add isolation between each input/output channel. This allows interference between channels to be prevented and allows for accurate sampling even if the equipment connected to the various channels have different ground levels.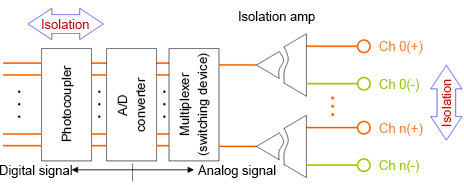
What is a photocoupler?
A photocoupler is a device that contains a light-emitting diode coupled to a phototransistor. The light-emitting diode outputs light when exposed to an electrical current (about 10 mA). The phototransistor receives this light, which turns the phototransistor ON, which results in an electrical current. Part of this optical signal is electrically insulated from the outside.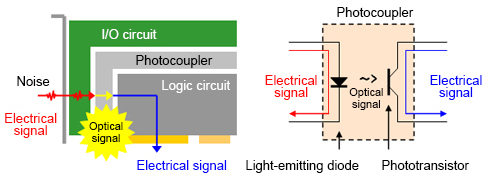
What is No. of I/O channels?
Input/output channels refer to the number of signals that can be input or output for a single device. In other words, this shows how many sensors (signal sources) or actuators (controlled objects) can be connected. In the specifications found in catalogs and the like, you may find expressions like X number of single-ended channels or X number of differential channels.What is single-ended input?
Single-ended input, which uses a signal wire and a ground wire for a two-wire connection, is a method of measuring the voltage of a signal source using the potential difference from ground. For analog input, this is the most common input method and has the advantage of using only two lines for any one signal source. Compared with a differential input, a disadvantage of single-ended input is that it is easily affected by noise.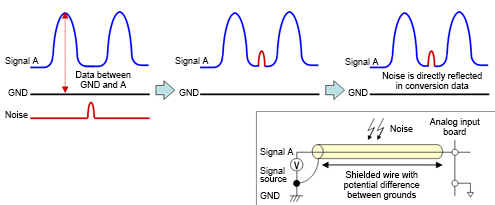
What is differential input?
Differential input uses two signal wires and a ground wire for a total of three wires for measuring the voltage of a signal source. The signal source potential (A–B) is measured by taking the difference in potential between ground and point A and between ground and point B. In this way, the noise from the ground is cancelled for A–B, which gives differential input the advantage of less susceptibility to noise compared to single-ended input. However, one disadvantage is that three wires are needed for one signal source, meaning that the number of channels that can be used is half that compared with single-ended input.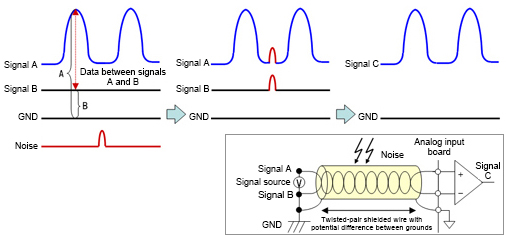
What is resolution?
Resolution refers to the extent of fineness that the analog signal can be digitally represented (approximately). A high resolution means that the voltage range can be finely divided, resulting in a more accurate conversion to digital values.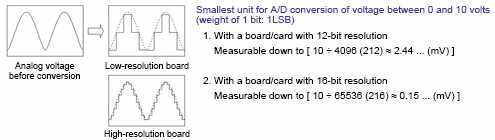
For example, if "measuring between 0°C and 100°C" ...
- Example 1: To measure at units of 1°C
- An accuracy of 1/100 is necessary. A device with 8 bits of resolution (2^8 = 256 segments) is sufficient.
- Example 2: To measure at units of 0.1°C
- An accuracy of 1/1,000 is necessary. A device with 12 bits of resolution (2^12 = 4,096 segments) is required.
- Example 3: To measure at units of 0.01°C
- An accuracy of 1/10,000 is necessary. A device with 16 bits of resolution (2^16 = 65,536 segments) is required.
What is I/O range?
This is the range of analog voltage or current that can be input or output. A bipolar range covers, for example, from -10 V to +10 V, while a unipolar range would cover only 0 to +10 V. The input/output range should be similar to the output from the sensor and the input to the actuator, or you could choose a device that offers a slightly wider range.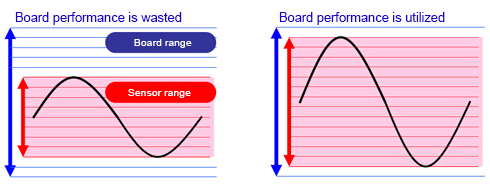
What is gain?
Gain refers to magnification. Some analog input devices are equipped with a function that can amplify the input signal. For example, with an external signal of 0 to 2.5 V, if the input range of an analog input device is 0 to 10 V, amplifying the external signal (the signal being input) by a factor of 4 and then converting the resulting 0 to 10 V signal rather than converting it as is will allow for conversion with higher precision.What is the conversion rate (sampling cycle)?
The conversion rate refers to the fineness at which an analog signal can be converted to a digital signal over a specific interval of time. It also shows how much time it takes for digital data to be output as analog data. Higher conversion speeds mean conversions with higher repeatability are possible.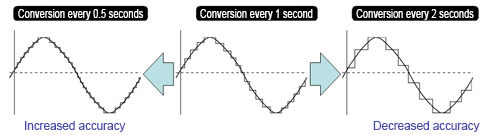
Sampling theorem
If sampling cannot be performed with a sampling cycle twice the input/measurement frequency, accurate waveform measurements will not be possible.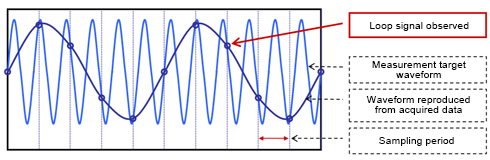
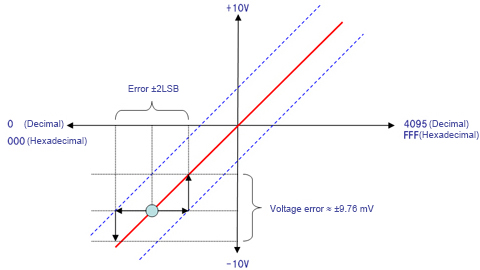
What is conversion accuracy?
Conversion accuracy refers to the error range produced when performing A/D conversions or D/A conversions. Errors are represented in units of 1 LSB. For example, the smallest resoluble unit for an A/D conversion device with a resolution of 12 bits set to an input range of ±10 V is 20 ÷ 4,096 ≈ 4.88 mV (1 LSB). If that A/D conversion board's conversion accuracy is noted as ±2 LSB, it means that there is a possibility that errors produced will be about 4.88 × 2 ≈ ±9.76 mV.- *LSB is an abbreviation of least significant bit and signifies the least significant bit of binary data.
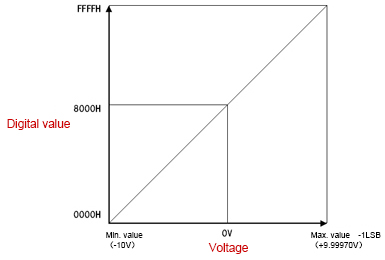
Relationship between binary data and voltage (with 16-bit resolution)
A/D conversion data input from a 16-bit analog input device becomes binary with 16 digits (hexadecimal = 4 digits), and with an analog output device, the D/A conversion data to set is handled with 16-digit binary (hexadecimal = 4 digits). As shown in the following figure, if "0000" is used at "-10 V", then "FFFF" is used at "9.99970 V".With a 16-bit resolution device, the voltage between -10 V and 0 V can be expressed as 32,768 data segments, where -10 V is "0000H" and 0 V is "8000H." As such, 0 V to 10 V becomes "8000H" to the max. "FFFFH", which must then be expressed as 32,767. For this reason, the maximum value is referred to as "+10 V -1 LSB".
These relationships are the same for any analog I/O device. For example, with analog output, to output a signal externally, "FFFF" is set to a device with 16-bit resolution, but the maximum outputtable voltage is "+10 V -1 LSB".
| Voltage meaning | Analog voltage (V) | DATA (hexadecimal) | Binary representation
|
|---|---|---|---|
| FSR-1LSB | 9.99970 | FFFF | 1111 1111 1111 1111 |
| FSR-2LSB | 9.99938 | FFFE | 1111 1111 1111 1110 |
| ・ ・ | ・ ・ | ・ ・ | ・ ・ |
| +1LSB | 0.00030 | 8001 | 1000 0000 0000 0001 |
| 0.00000 | 8000 | 1000 0000 0000 0000 | |
| ・ ・ | ・ ・ | ・ ・ | ・ ・ |
| -1/2FSR+1LSB | -9.99970 | 0001 | 0000 0000 0000 0001 |
| -1/2FSR | -10.00000 | 0000 | 0000 0000 0000 0000 |
Abbreviation (unit) meanings
LSB
Abbreviation of least significant bit. Signifies the least significant bit of binary data.MSB
Abbreviation of most significant bit. Signifies the most significant bit of binary data.FSR
Abbreviation of full scale range. In the ±10 V range, FSR becomes "20".Expressing analog values as digital values
Data converted (quantized) through an analog input (A/D conversion) and data set to an analog output (D/A conversion) can be represented using the following unique code systems. The methods for displaying these systems are as follows.Straight binary
A voltage of 0 V is given a digital value of 0, and the digital value increases in proportion to the increase in voltage. A unipolar form is used.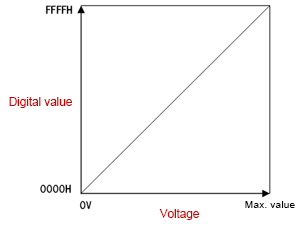
Offset binary
The maximum (lowest) value of negative voltage is given a digital value of 0. In this way, 0 V is assigned a digital value in the middle, and the largest positive voltage value is given the largest digital value. A bipolar form is used.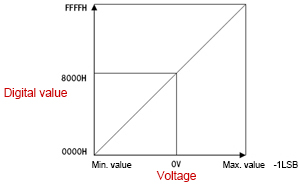
Complement binary(Two's complement)
To obtain the two's complement, the most significant bit of the offset binary code is reversed. A two's complement expression is an easy-to-use code for calculations on a computer. This data format can be found in bipolar forms.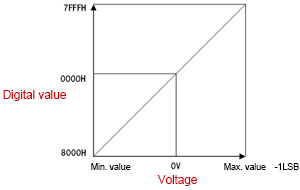
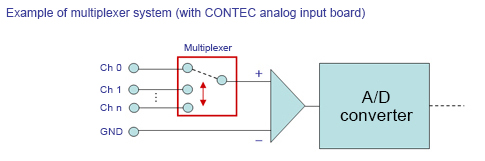
What is the sampling method?
When performing sampling over multiple channels, a multiplexer method using multiplexers (switching units) or a simultaneous sampling method is used.The multiplexer method performs sampling while switching the multiplexer, meaning that simultaneous conversion of more than one channel is impossible (because time is needed to change between channels).
With the simultaneous sampling method, there are two types: where each channel is equipped with an A/D converter, and where a sample/hold amplifier is equipped. Either type is capable of performing simultaneous conversion over multiple channels.
Conversion rates and Nos. of channels
In a system where the analog input channels are switched through a multiplexer method, to perform sampling over multiple channels, the settable sampling period must maintain the following relationship. Conversion rate × sampling cycle ≤ sampling cycle"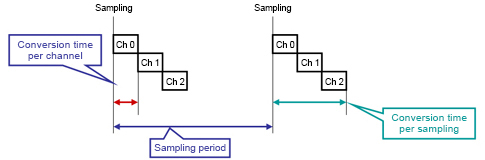
What is a clock?
A clock indicates the timing at which conversion operations of an analog I/O device can be synchronized. For sampling clocks that determine sampling cycles, the following main methods are used.Internal clock
A timer element capable of setting the sampling period is installed in the device. As a clock source, this is a method for performing periodic conversions. Internal clocks are useful for time-series processing at precise and rapid cycles.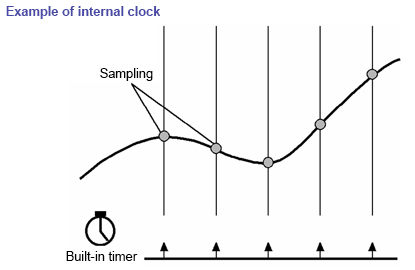
External clock
External clocks can be used for devices equipped with external clock input terminals. Conversion is performed in synchronization with a pulse signal or other signal input from an external source. This method is useful for synchronizing with external devices.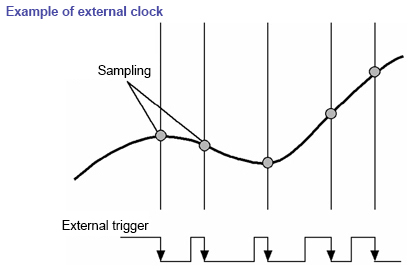
Software clock
A software clock is a method of performing periodic conversions by synchronizing with the system timer on a PC and sending a start command from the software. However, because errors with VisualBasic's timer control and other functions are large, this method is not suitable for systems requiring fast and accurate cycles.What is a trigger?
A trigger is a source for determining the timing at which to start or stop a conversion. Starting and stopping can both be set independently. The main triggers are as follows.Software trigger
A software trigger starts/stops conversion operations using commands from software.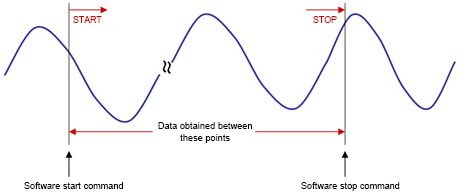
External trigger
An external trigger starts/stops conversion operations using an external signal (digital signal). Conversion operation starts or stops when the pre-set edge movement (rising or falling) is input from the external control signal.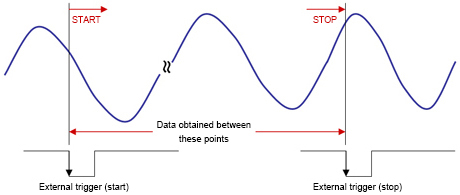
Level comparison (conversion data comparison) trigger
Conversion is started or stopped according to the signal changes for a specified channel. A pre-set comparison level is compared with the magnitude of the analog signal for a specified channel, and if the criteria match, the conversion operation starts/stops.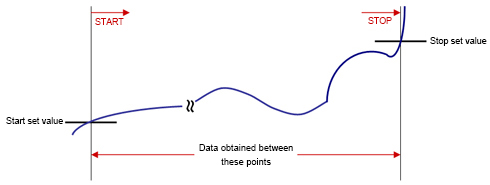
What is buffer memory?
Buffer memory is where conversion data is temporarily stored. Such memory not only enables fast and high-performance analog input processing but also significantly reduces the load on the computer. Depending on the application, buffer memory can employ either the FIFO method or the ring method.FIFO method
With the FIFO (First In, First Out) method, converted data is stored in the buffer memory in a first-come, first-served behavior with data written to the buffer memory first being read first (in chronological order). The converted data read from within the memory is delivered sequentially, with reading of the oldest conversion data remaining in the buffer memory always readable. Data that exceeds the FIFO memory capacity will be discarded and not written, and data that has been read will be discarded from the buffer memory.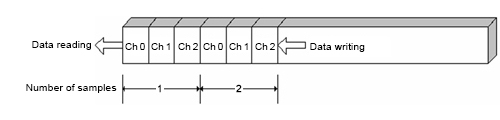
Ring method
The ring method arranges the storage area in the buffer memory like a ring. Conversion data is written sequentially, and when storing beyond the memory capacity, areas where prior conversion data is stored are overwritten. Ring memory is useful when data is not normally obtained but data near a conversion operation stop due to some event should be obtained. With the ring method, once data is captured, it can be read multiple times before it is overwritten.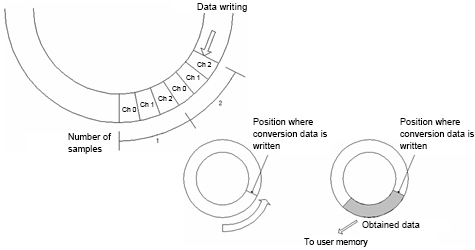
What is bus master transfer function?
This function is a DMA (direct memory access) transfer that uses a PCI bus master function.- Without applying a load on the PC's CPU, data can be transferred from the device directly to the PC memory at a speed of 80 MB/sec (maximum 133 MB/sec).
- Because the CPU's capacity is not reduced due to data transfer processes and the like, it is able to perform other processes, thus reducing the impact on other applications.
- The necessary settings for input/output are already set to the device, and because the board performs processing based on that information, it's possible to construct a more efficient system than possible with normal input/output processing.
Normal processing
With normal input/output processing, after the CPU reads the data from the device, it stores the information in the main unit's memory. This intermediate CPU cannot be used for other processes. In the following figure, other processes are only possible after (4) and (5) are finished.Bus mastering
During bus mastering, the CPU instructs bus master processing for the device, allowing data to be sent to the main unit's memory directly from the device (without going through the CPU). In the following figure, other processes can be performed while (2) and (3) are processing.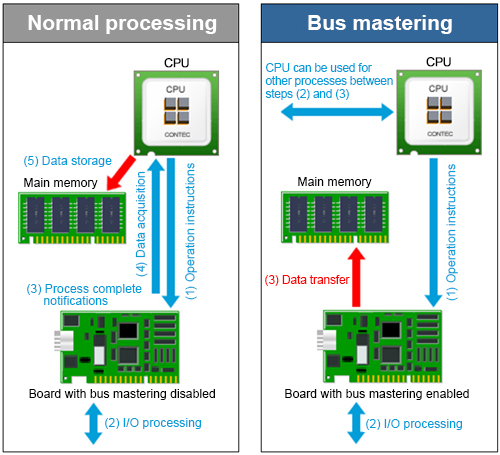
What is interruption?
This function generates priority processing externally by connecting a certain input terminal to an IRQ (interrupt request line) on the computer. By detecting changes in external devices, interruption can be used, for example, in applications that perform specific processing and for processing emergency high-priority external commands, to name a few.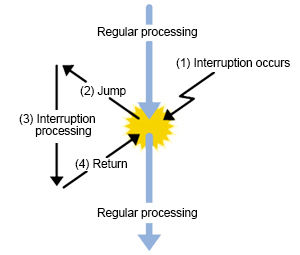
What is current consumption?
To operate a device, power is needed, but current consumption indicates how much current that board consumes. This power is usually supplied from the computers expansion bus connector.This means that the total maximum current consumption of the board should not be more than the rated power capacity of the computer (the maximum current that can be supplied to the expansion slot).
If the rated power capacity is exceeded, the computer's power supply voltage will be reduced, which could result in such trouble as runaway. For this reason, it's necessary to take appropriate countermeasures, such as extending the computer's slots by using an "expansion unit".
Example: The power supply capacity the computer can supply to the expansion slot is 3.6 A.
- When mounting two 1.2 A external interface boards, the maximum current consumption is as follows:
- 1.2 (A) × 2 (boards) = 2.4 A, which is lower than the power capacity of the computer (3.6 A). [Acceptable]
- When mounting six 0.8 A external interface boards, the maximum current consumption becomes:
- 0.8 (A) × 6 (boards) = 4.8 A, higher than the power capacity of the computer (3.6 A). [Unacceptable]
Types of noise and applicable countermeasures
Noise can be roughly divided into the following two types. Unlike electrical testing, various sources of noise are present on-site, resulting in many cases that do not go as expected in theory. In such cases, many causes of unexpected inaccuracy are due to noise.External noise
- Noise that is transferred through the air from outside the signal transmission line.
- Noise that exists around wiring for movement system devices such as motors, and noise that results from wiring located in the vicinity.
Internal noise
- Noise caused by connection of analog input/output circuits.
- Noise and offset voltages caused by ground potential differences between devices.
- Interference noise and crosstalk caused by the wiring material.
Solution
The general rule, particularly when performing measurement, is that noise should not affect the measurement target. To ensure this, it's necessary to take care that impedance, ground levels, and the like, are matching. Familiarizing yourself with solutions is not difficult, but it could be said that failing to consider these solutions can have a large impact. The table below lists some countermeasures against noise.Hard
| Countermeasure | Specific example | Effect | Points to remember |
|---|---|---|---|
| Strengthen signal level | Amplification of the measurement point of a weak signal | General noise removal | Small effect on PC side |
| Elimination through wiring method | Using shielded cables | Elimination of incoming noise | |
| Elimination through wiring method | Using twisted-pair cables | Elimination of crosstalk | |
| Elimination through wiring method | Separate wiring for measurement and control system from the power system (power source, GND and piping) | Elimination of incoming noise | |
| Elimination by incorporating a filter circuit | EMI filter and CR filter incorporation | General noise removal | Effective when noise frequency is identifiable |
| Elimination by input/output format | Connect with differential input/output | Elimination of incoming noise | Effective against common mode noise only |
| Elimination through grounding | Connect each device to ground | Removal of potential differences between devices | Some grounds instead become sources of noise |
Soft
| Countermeasure | Specific example | Effect | Points to remember |
|---|---|---|---|
| Elimination through averaging calculation(multiple readings) | Noise smoothing by moving average | Elimination of high-frequency noise | Responses become worse as a result of change |
| Elimination through averaging calculation(multiple readings) | Elimination of noise through block averaging | Elimination of high-frequency noise | Sampling rates become lower |
| Elimination through software filters | Elimination of noise through filter functions | Elimination of high-frequency noise | Not suitable for real-time processing |
Control unit
_________________________________________________________________________________
The control unit (CU) is a component of a computer's central processing unit (CPU) that directs the operation of the processor. It tells the computer's memory, arithmetic and logic unit and input and output devices how to respond to the instructions that have been sent to the processor.
It directs the operation of the other units by providing timing and control signals. Most computer resources are managed by the CU. It directs the flow of data between the CPU and the other devices. John von Neumann included the control unit as part of the von Neumann architecture. In modern computer designs, the control unit is typically an internal part of the CPU with its overall role and operation unchanged since its introduction.
Functions of the control unit
The Control unit (CU) is digital circuitry contained within the processor that coordinates the sequence of data movements into, out of, and between a processor's many sub-units. The result of these routed data movements through various digital circuits (sub-units) within the processor produces the manipulated data expected by a software instruction (loaded earlier, likely from memory). It controls (conducts) data flow inside the processor and additionally provides several external control signals to the rest of the computer to further direct data and instructions to/from processor external destinations (i.e. memory).Examples of devices that require a CU are CPUs and graphics processing units (GPUs). The CU receives external instructions or commands which it converts into a sequence of control signals that the CU applies to the data path to implement a sequence of register-transfer level operations.
More precisely, the Control Unit (CU) is generally a sizable collection of complex digital circuitry interconnecting and directing the many execution units (i.e. ALU, data buffers, registers) contained within a CPU. The CU is normally the first CPU unit to accept from an externally stored computer program, a single instruction (based on the CPU's instruction set). The CU then decodes this individual instruction into several sequential steps (fetching addresses/data from registers/ memory, managing execution [i.e. data sent to the ALU or I/O], and storing the resulting data back into registers/memory) that controls and coordinates the CPU's inner works to properly manipulate the data. The design of these sequential steps are based on the needs of each instruction and can range in number of steps, the order of execution, and which units are enabled.
Thus by only using a program of set instructions in memory, the CU will configure all the CPU's data flows as needed to manipulate the data correctly between instructions. This results in a computer that could run a complete program and require no human intervention to make hardware changes between instructions (as had to be done when using only punch cards for computations before stored programmed computers with CUs were invented). These detailed steps from the CU dictate which of the CPU's interconnecting hardware control signals to enable/disable or which CPU units are selected/de-selected and the unit's proper order of execution as required by the instruction's operation to produce the desired manipulated data. Additionally, the CU's orderly hardware coordination properly sequences these control signals then configures the many hardware units comprising the CPU, directing how data should also be moved, changed, and stored outside the CPU (i.e. memory) according to the instruction's objective.
Depending on the type of instruction entering the CU, the order and number of sequential steps produced by the CU could vary the selection and configuration of which parts of the CPU's hardware are utilized to achieve the instruction's objective (mainly moving, storing, and modifying data within the CPU). This one feature, that efficiently uses just software instructions to control/select/configure a computer's CPU hardware (via the CU) and eventually manipulates a program's data, is a significant reason most modern computers are flexible and universal when running various programs. As compared to some 1930s or 1940s computers without a proper CU, they often required rewiring their hardware when changing programs. This CU instruction decode process is then repeated when the Program Counter is incremented to the next stored program address and the new instruction enters the CU from that address, and so on till the programs end.
Other more advanced forms of Control Units manage the translation of instructions (but not the data containing portion) into several micro-instructions and the CU manages the scheduling of the micro-instructions between the selected execution units to which the data is then channeled and changed according to the execution unit's function (i.e., ALU contains several functions). On some processors, the Control Unit may be further broken down into additional units, such as an instruction unit or scheduling unit to handle scheduling, or a retirement unit to deal with results coming from the instruction pipeline. Again, the Control Unit orchestrates the main functions of the CPU: carrying out stored instructions in the software program then directing the flow of data throughout the computer based upon these instructions (roughly likened to how traffic lights will systematically control the flow of cars [containing data] to different locations within the traffic grid [CPU] until it parks at the desired parking spot [memory address/register]. The car occupants [data] then go into the building [execution unit] and comes back changed in some way then get back into the car and returns to another location via the controlled traffic grid).
Hardwired control unit
Hardwired control units are implemented through use of combinational logic units, featuring a finite number of gates that can generate specific results based on the instructions that were used to invoke those responses. Hardwired control units are generally faster than microprogrammed designs.Their design uses a fixed architecture—it requires changes in the wiring if the instruction set is modified or changed. This architecture is preferred in reduced instruction set computers (RISC) as they use a simpler instruction set.
A controller that uses this approach can operate at high speed; however, it has little flexibility, and the complexity of the instruction set it can implement is limited.
The hardwired approach has become less popular as computers have evolved. Previously, control units for CPUs used ad-hoc logic, and they were difficult to design.
Microprogram control unit
The idea of microprogramming was introduced by Maurice Wilkes in 1951 as an intermediate level to execute computer program instructions. Microprograms were organized as a sequence of microinstructions and stored in special control memory. The algorithm for the microprogram control unit,unlike the hardwired control unit, is usually specified by flowchart description. The main advantage of the microprogram control unit is the simplicity of its structure. Outputs of the controller are organized in microinstructions and they can be easily replacedDigital control unit with LCD display
_________________________________________________________________________________
machines have a control unit with the basic settings. The plug- and-play design of the machines makes installation easy and does not require any adjustments in 90% of the situations. For special packaging requirements the machine offers the flexibility to adjust sealing time and vacuum time. The vacuum time can be set and the vacuum level reached can be monitored with the vacuum meter.

The professional machines are standard equipped with a digital LCD control unit with 10 programs.
The more advanced machines are equipped with a 10 program sensor control system which actually measures the vacuum in the vacuum chamber. The time controlled machines can easily be converted into sensor controlled machines later on. The sensor measures evaporation when moist products or liquids, like sauces, are being packed. At this optimum point moisture is extracted from the product causing it to dry out, loose weight or start bubbling and
spilling over. The sensor detects this point immediately as being the optimum level where all air and oxygen has been removed and continues the cycle by sealing the package.
The digital LCD control unit allows all settings to be easily changed. An unique indication gives the operator the option for letting the pump run for several cycles after finishing the operation. This will extend the periods
between oil change and extending the life time of the pump by removing moisture from the oil in the system.
The control panel has also a clear clear indication for upcoming service intervention.
Computer Organization | Control Unit and design
_________________________________________________________________________________
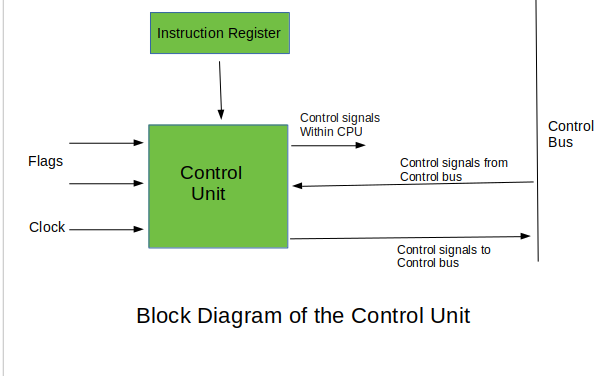
Control Unit is the part of the computer’s central processing unit (CPU), which directs the operation of the processor. It was included as part of the Von Neumann Architecture by John von Neumann. It is the responsibility of the Control Unit to tell the computer’s memory, arithmetic/logic unit and input and output devices how to respond to the instructions that have been sent to the processor. It fetches internal instructions of the programs from the main memory to the processor instruction register, and based on this register contents, the control unit generates a control signal that supervises the execution of these instructions.
A control unit works by receiving input information to which it converts into control signals, which are then sent to the central processor. The computer’s processor then tells the attached hardware what operations to perform. The functions that a control unit performs are dependent on the type of CPU because the architecture of CPU varies from manufacturer to manufacturer. Examples of devices that require a CU are:
- Control Processing Units(CPUs)
- Graphics Processing Units(GPUs)
Functions of the Control Unit –
- It coordinates the sequence of data movements into, out of, and between a processor’s many sub-units.
- It interprets instructions.
- It controls data flow inside the processor.
- It receives external instructions or commands to which it converts to sequence of control signals.
- It controls many execution units(i.e. ALU, data buffers and registers) contained within a CPU.
- It also handles multiple tasks, such as fetching, decoding, execution handling and storing results.
There are two types of control units: Hardwired control unit and Micro programmable control unit.
- Hardwired Control Unit –
In the Hardwired control unit, the control signals that are important for instruction execution control are generated by specially designed hardware logical circuits, in which we can not modify the signal generation method without physical change of the circuit structure. The operation code of an instruction contains the basic data for control signal generation. In the instruction decoder, the operation code is decoded. The instruction decoder constitutes a set of many decoders that decode different fields of the instruction op code.
As a result, few output lines going out from the instruction decoder obtains active signal values. These output lines are connected to the inputs of the matrix that generates control signals for executive units of the computer. This matrix implements logical combinations of the decoded signals from the instruction op code with the outputs from the matrix that generates signals representing consecutive control unit states and with signals coming from the outside of the processor, e.g. interrupt signals. The matrices are built in a similar way as a programmable logic arrays.
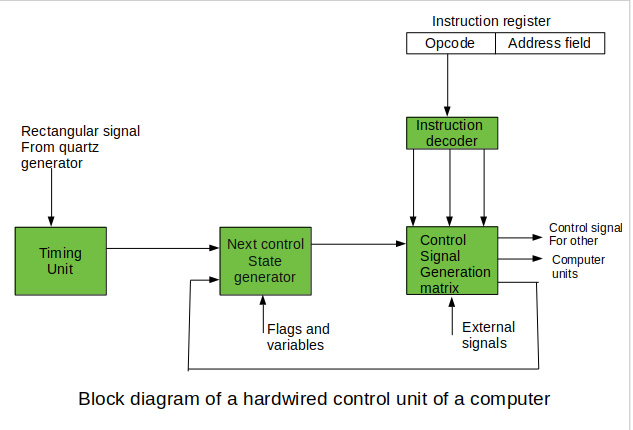
Control signals for an instruction execution have to be generated not in a single time point but during the entire time interval that corresponds to the instruction execution cycle. Following the structure of this cycle, the suitable sequence of internal states is organized in the control unit.
A number of signals generated by the control signal generator matrix are sent back to inputs of the next control state generator matrix. This matrix combines these signals with the timing signals, which are generated by the timing unit based on the rectangular patterns usually supplied by the quartz generator. When a new instruction arrives at the control unit, the control units is in the initial state of new instruction fetching. Instruction decoding allows the control unit enters the first state relating execution of the new instruction, which lasts as long as the timing signals and other input signals as flags and state information of the computer remain unaltered. A change of any of the earlier mentioned signals stimulates the change of the control unit state.
This causes that a new respective input is generated for the control signal generator matrix. When an external signal appears, (e.g. an interrupt) the control unit takes entry into a next control state that is the state concerned with the reaction to this external signal (e.g. interrupt processing). The values of flags and state variables of the computer are used to select suitable states for the instruction execution cycle.
The last states in the cycle are control states that commence fetching the next instruction of the program: sending the program counter content to the main memory address buffer register and next, reading the instruction word to the instruction register of computer. When the ongoing instruction is the stop instruction that ends program execution, the control unit enters an operating system state, in which it waits for a next user directive. - Micro programmable control unit –
The fundamental difference between these unit structures and the structure of the hardwired control unit is the existence of the control store that is used for storing words containing encoded control signals mandatory for instruction execution.
In micro programmed control units, subsequent instruction words are fetched into the instruction register in a normal way. However, the operation code of each instruction is not directly decoded to enable immediate control signal generation but it comprises the initial address of a micro program contained in the control store.
- With a single-level control store:
In this, the instruction op code from the instruction register is sent to the control store address register. Based on this address, the first microinstruction of a micro program that interprets execution of this instruction is read to the microinstruction register. This microinstruction contains in its operation part encoded control signals, normally as few bit fields. In a set microinstruction field decoders, the fields are decoded. The microinstruction also contains the address of the next microinstruction of the given instruction micro program and a control field used to control activities of the microinstruction address generator.
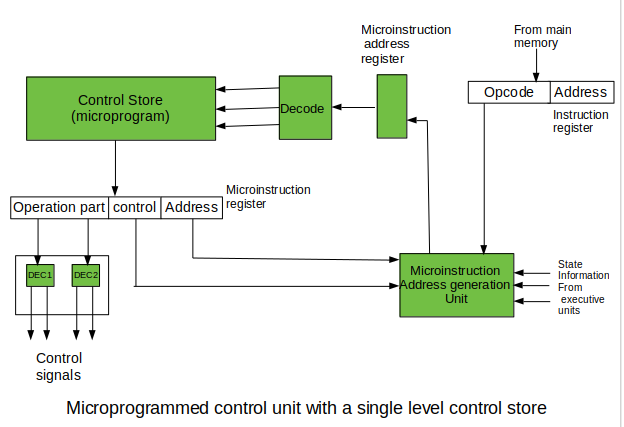
The last mentioned field decides the addressing mode (addressing operation) to be applied to the address embedded in the ongoing microinstruction. In microinstructions along with conditional addressing mode, this address is refined by using the processor condition flags that represent the status of computations in the current program. The last microinstruction in the instruction of the given micro program is the microinstruction that fetches the next instruction from the main memory to the instruction register. - With a two-level control store:
In this, in a control unit with a two-level control store, besides the control memory for microinstructions, a nano-instruction memory is included. In such a control unit, microinstructions do not contain encoded control signals. The operation part of microinstructions contains the address of the word in the nano-instruction memory, which contains encoded control signals. The nano-instruction memory contains all combinations of control signals that appear in micro programs that interpret the complete instruction set of a given computer, written once in the form of nano-instructions.
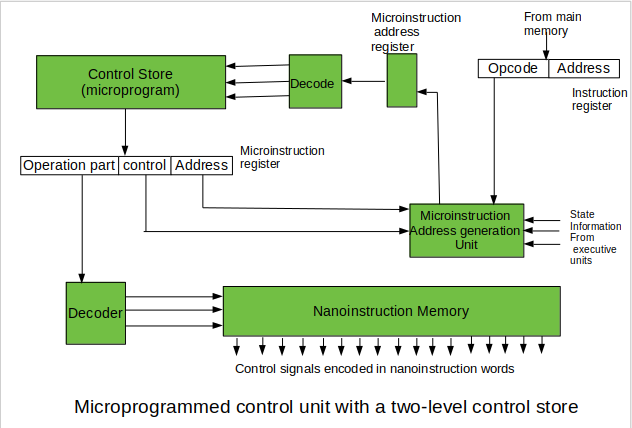
In this way, unnecessary storing of the same operation parts of microinstructions is avoided. In this case, microinstruction word can be much shorter than with the single level control store. It gives a much smaller size in bits of the microinstruction memory and, as a result, a much smaller size of the entire control memory. The microinstruction memory contains the control for selection of consecutive microinstructions, while those control signals are generated at the basis of nano-instructions. In nano-instructions, control signals are frequently encoded using 1 bit/ 1 signal method that eliminates decoding.
- With a single-level control store:
Development of an electro-mechanic control system
only the example of control of mechanic
______________________________________________________________________________
INDUSTRIAL AUTOMATION
Electro-Mechanical (Relay) Control
Electro-mechanical control typically consists of multiple Relays, Timers, and/or Counters wired together on an enclosure panel. Electro-mechanical Control is also referred to simply as "Relay Control" perhaps a more accurate term, since solid state Relays, Timers, and Counters have become very common. Today this approach is common with very simple and small applications.


Electrical Drive
The system which is used for controlling the motion of an electrical machine, such type of system is called an electrical drive. In other words, the drive which uses the electric motor is called electrical drive. The electrical drive uses any of the prime movers like diesel or a petrol engine, gas or steam turbines, steam engines, hydraulic motors and electrical motors as a primary source of energy. This prime mover supplies the mechanical energy to the drive for motion control.
The block diagram of the electrical drive is shown in the figure below. The electrical load like fans, pumps, trains, etc., consists the electrical motor. The requirement of an electrical load is determined regarding speed and torque. The motor which suited the capabilities of the load is chosen for the load drive.
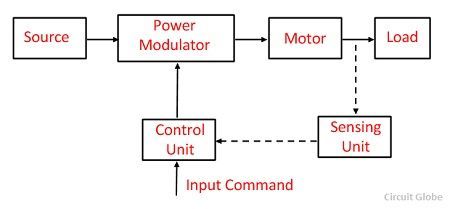
The main parts of the electrical drives are power modulator, motor, controlling unit and sensing units.Their parts are explained below in details.
Power Modulator – The power modulator regulates the output power of the source. It controls the power from the source to the motor in such a manner that motor transmits the speed-torque characteristic required by the load. During the transient operations like starting, braking and speed reversing the excessive current drawn from the source. This excessive current drawn from the source may overload it or may cause a voltage drop. Hence the power modulator restricts the source and motor current.
The power modulator converts the energy according to the requirement of the motor e.g. if the source is DC and an induction motor is used then power modulator convert DC into AC. It also selects the mode of operation of the motor, i.e., motoring or braking.
Control Unit – The control unit controls the power modulator which operates at small voltage and power levels. The control unit also operates the power modulator as desired. It also generates the commands for the protection of power modulator and motor. An input command signal which adjusts the operating point of the drive, from an input to the control unit.
Sensing Unit – It senses the certain drive parameter like motor current and speed. It mainly required either for protection or for closed loop operation.
Advantages of Electrical Drive
The following are the advantages of electrical drive.- The electric drive has very large range of torque, speed and power.
- Their working is independent of the environmental condition.
- The electric drives are free from pollution.
- The electric drives operate on all the quadrants of speed torque plane.
- The drive can easily be started and it does not require any re fuelling.
- The efficiency of the drives is high because fewer losses occur on it.
Because of the following advantages, the mechanical energy already available from a non-electrical prime mover is sometimes first converted into electrical energy by a generator and back to a mechanical energy of an electrical motor. Electrical link thus provides between the non-electrical prime mover and the load impact to the drive flexible control characteristic.
For example – The diesel locomotive produces the diesel energy by the help of the diesel engine. The mechanical energy is converted into an electrical energy by the help of the generator. This electrical energy is used for driving the other locomotive.
Disadvantages of Electrical Drive
The power failure completely disabled the whole of the system.- The application of the drive is limited because it cannot use in a place where the power supply is not available.
- It can cause noise pollution.
- The initial cost of the system is high.
- It has a poor dynamic response.
- The output power obtained from the drive is low.
- During the breakdown of conductors or short circuit, the system may get damaged due to which several problems occur.
Application of Electric Drive
It is used in a large number of industrial and domestic applications like transportation systems, rolling mills, paper machines, textile mills, machine tools, fans, pumps, robots and washing, etc.

What is the difference between analog and digital signals? Look at some examples of analog and digital devices, and how we convert between the two types of signals.
Analog vs Digital Devices
They say we live in an increasingly digital world. But what exactly does 'digital' even mean? You probably know that electronics, like computers, smart phones, and televisions are digital. But what is it about them that makes them digital?Digital and analog really refers to a way of transferring and storing information. The natural world is completely analog. Information in the natural world is transferred using waves. You see a friend on the other side of the food court because a light wave bounces off them and enters your eye. You hear your favorite song coming out of a nearby store because sound waves from the store make it into your ear and vibrate your eardrum. Your eardrum physically moves up and down in a wave pattern.
Digital signals are different. A digital signal is what the computer understands, and is made up of patterns of electricity. Electricity is a flow of charge (electrons to be exact) around the circuit. You can send a signal using electricity by varying how fast those electrons move. In a computer, electrical signals represent the only language that computers really understand - binary code containing a series of ones and zeros. That's what a digital signal is - pulses of electricity representing ones and zeros.
 |
So far this all may seem kind of abstract, but you probably know of many examples of both digital and analog signals. Most modern ways of transferring and storing information are digital: USB cables and sticks, HDMI connections, SD cards, CDs, and DVDs. All of these contain information stored as a series of ones and zeros, which are transferred from place to place using electricity. But you don't have to go too far back in time to find examples of analog signals and storage: cassette tapes, records, television through an aerial antenna, basic telephones, and most musical instruments were all analog. For example, cassette tapes and records contain actual bumps that represent the soundwaves that are stored in them.
 |
The benefits of analog include the charm of the imperfections of the medium (like the hiss and pops of old recordings), the fact that less conversions need to be done, the information is more complete and exact (nothing is rounded), and that a computer failure cannot cause you to lose an analog recording. Sometimes analog signals can be better quality when compared to cheap digital equipment. The benefits of digital signals are that they can be transferred at the speed of light, tend to pick up less noise (like hiss in sound recordings), are cheaper, allow you to access any part of recording almost instantly, allow copies to be made without losing or degrading the original, and less of the signal is lost when transmitted over a long distance.
Converting Between Analog and Digital
Although the days of analog devices are going away fast, converting between analog and digital signals will always be important. Why? Because we humans are analog. When you record yourself singing a song, or create a home movie, you're taking things that are analog - that are physical and real - and converting them into digital signals on your smart phone or video camera.
Analog devices accept, process and output analog signals, typically voltage but sometimes current or even frequency. The signals fall within a designated range, without discrete from one value to another.
Digital devices accept, process and output digital signals which are discrete signals formed as either a series of pulses, varying from 0 volts to +rail voltage.
Parallel processing devices also accept pulse trains, but accept multiple inputs simultaneously. Parallel architecture is typically faster, as it can act on more inputs/outputs per cycle.
Analog and digital signals are used to transmit information, usually through electric signals. In both these technologies, the information, such as any audio or video, is transformed into electric signals. The difference between analog and digital technologies is that in analog technology, information is translated into electric pulses of varying amplitude. In digital technology, translation of information is into binary format (zero or one) where each bit is representative of two distinct amplitudes.
Comparison chart
| Analog | Digital | |
|---|---|---|
| Signal | Analog signal is a continuous signal which represents physical measurements. | Digital signals are discrete time signals generated by digital modulation. |
| Waves | Denoted by sine waves | Denoted by square waves |
| Representation | Uses continuous range of values to represent information | Uses discrete or discontinuous values to represent information |
| Example | Human voice in air, analog electronic devices. | Computers, CDs, DVDs, and other digital electronic devices. |
| Technology | Analog technology records waveforms as they are. | Samples analog waveforms into a limited set of numbers and records them. |
| Data transmissions | Subjected to deterioration by noise during transmission and write/read cycle. | Can be noise-immune without deterioration during transmission and write/read cycle. |
| Response to Noise | More likely to get affected reducing accuracy | Less affected since noise response are analog in nature |
| Flexibility | Analog hardware is not flexible. | Digital hardware is flexible in implementation. |
| Uses | Can be used in analog devices only. Best suited for audio and video transmission. | Best suited for Computing and digital electronics. |
| Applications | Thermometer | PCs, PDAs |
| Bandwidth | Analog signal processing can be done in real time and consumes less bandwidth. | There is no guarantee that digital signal processing can be done in real time and consumes more bandwidth to carry out the same information. |
| Memory | Stored in the form of wave signal | Stored in the form of binary bit |
| Power | Analog instrument draws large power | Digital instrument drawS only negligible power |
| Cost | Low cost and portable | Cost is high and not easily portable |
| Impedance | Low | High order of 100 megaohm |
| Errors | Analog instruments usually have a scale which is cramped at lower end and give considerable observational errors. | Digital instruments are free from observational errors like parallax and approximation errors. |
Definitions of Analog vs. Digital signals
An Analog signal is any continuous signal for which the time varying feature (variable) of the signal is a representation of some other time varying quantity, i.e., analogous to another time varying signal. It differs from a digital signal in terms of small fluctuations in the signal which are meaningful.A digital signal uses discrete (discontinuous) values. By contrast, non-digital (or analog) systems use a continuous range of values to represent information. Although digital representations are discrete, the information represented can be either discrete, such as numbers or letters, or continuous, such as sounds, images, and other measurements of continuous systems.
Properties of Digital vs Analog signals
Digital information has certain properties that distinguish it from analog communication methods. These include- Synchronization – digital communication uses specific synchronization sequences for determining synchronization.
- Language – digital communications requires a language which should be possessed by both sender and receiver and should specify meaning of symbol sequences.
- Errors – disturbances in analog communication causes errors in actual intended communication but disturbances in digital communication does not cause errors enabling error free communication. Errors should be able to substitute, insert or delete symbols to be expressed.
- Copying – analog communication copies are quality wise not as good as their originals while due to error free digital communication, copies can be made indefinitely.
- Granularity – for a continuously variable analog value to be represented in digital form there occur quantization error which is difference in actual analog value and digital representation and this property of digital communication is known as granularity.
Differences in Usage in Equipment
Many devices come with built in translation facilities from analog to digital. Microphones and speaker are perfect examples of analog devices. Analog technology is cheaper but there is a limitation of size of data that can be transmitted at a given time.Digital technology has revolutionized the way most of the equipments work. Data is converted into binary code and then reassembled back into original form at reception point. Since these can be easily manipulated, it offers a wider range of options. Digital equipment is more expensive than analog equipment.
Comparison of Analog vs Digital Quality
Digital devices translate and reassemble data and in the process are more prone to loss of quality as compared to analog devices. Computer advancement has enabled use of error detection and error correction techniques to remove disturbances artificially from digital signals and improve quality.Differences in Applications
Digital technology has been most efficient in cellular phone industry. Analog phones have become redundant even though sound clarity and quality was good.Analog technology comprises of natural signals like human speech. With digital technology this human speech can be saved and stored in a computer. Thus digital technology opens up the horizon for endless possible uses.
All of electronics can be divided into two broad categories: analog and digital. One of the most common examples of the difference between analog and digital devices is a clock. On the analog clock, the time is represented by hands that spin around a dial and point to a location on the dial that represents the approximate time. On a digital clock, a numeric display indicates the exact time.

Analog refers to circuits in which quantities such as voltage or current vary at a continuous rate. When you turn the dial of a potentiometer, for example, you change the resistance by a continuously varying rate. The resistance of the potentiometer can be any value between the minimum and maximum allowed by the pot.
If you create a voltage divider by placing a fixed resistor in series with a potentiometer, the voltage at the point between the fixed resistor and the potentiometer increases or decreases smoothly as you turn the knob on the potentiometer.
In digital electronics, quantities are counted rather than measured. There’s an important distinction between counting and measuring. When you count something, you get an exact result. When you measure something, you get an approximate result.
Consider a cake recipe that calls for 2 cups of flour, 1 cup of milk, and 2 eggs. To get 2 cups of flour, you scoop some flour into a 1-cup measuring cup, pour the flour into the bowl, and then do it again. To get a cup of milk, you pour milk into a liquid measuring cup until the top of the milk lines up with the 1-cup line printed on the measuring cup and then pour the milk into the mixing bowl. To get 2 eggs, you count out 2 eggs, crack them open, and add them to the mixing bowl.
The measurements for flour and milk in this recipe are approximate. A teaspoon too much or too little won’t affect the outcome. But the eggs are precisely counted: exactly 2. Not 3, not 1, not 11/2, but 2. You can’t have a teaspoon too many or too few eggs. There will be exactly 2 eggs, because you count them.
So which is more accurate — analog or digital? In one sense, digital circuits are more accurate because they count with complete precision. You can precisely count the number of jelly beans in a jar, for example.
But if you weigh the jar by putting it on an analog scale, your reading may be a bit imprecise because you can’t always judge the exact position of the needle. Say that the needle on the scale is about halfway between 4 pounds and 5 pounds. Does the jar weigh 4.5 pounds or 4.6 pounds? You can’t tell for sure, so you settle for approximately 4.5 pounds.
On the other hand, digital circuits are inherently limited in their precision because they must count in fixed units. Most digital thermometers, for example, have only one digit to the right of the decimal point. Thus, they can indicate a temperature of 98.6 or 98.7 but can’t indicate 98.65.
Here are a few other thoughts to ponder concerning the differences between digital and analog systems:
- Saying that a system is digital isn’t the same as saying that it’s binary. Binary is a particular type of digital system in which the counting is all done with the binary number system. Nearly all digital systems are also binary systems, but the two words aren’t interchangeable.
- Many systems are a combination of binary and analog systems. In a system that combines binary and analog values, special circuitry is required to convert from analog to digital, or vice versa. An input voltage (analog) might be converted to a sequence of pulses, one for each volt; then the pulses can be counted to determine the voltage.
What is the difference between analog and digital technology?
_________________________________________________________________________________
Answer: Computers are digital devices, meaning they perform all calculations using ones and zeros. This method of computing is referred to as the "binary system," and is the heart of all digital technology. Devices such as hard drives, CD recorders, and Mini DV camcorders are digital devices, and therefore record data digitally, as ones and zeros.
VCRs, tape players, and record players, on the other hand, are analog devices. This is because they record data linearly from one point to another. Imagine a bumpy line moving from left to right -- that is what an analog audio recording would look like. Analog devices read the media, such as tapes or records, by scanning the physical data off the media.
For example, a record player reads the bumps and dips in the grooves of the record and translates the information into an audio signal. An audio CD player, however, reads ones and zeros off a compact disc and translates that information into an audio signal. However, the ones and zeros only estimate the actual soundwave, whereas a record player records the exact sound. When you hear terms like "sampling rate" or "bit rate," these refer to how many times per second the digital signal is sampled. The higher the number, the more accurate the estimate is, which translates into higher quality sound or video.
So why is digital technology used if analog provides a better representation of the recorded information? Well, since computers perform digital computations, they can only work with digital media. Therefore, all analog audio or video media must be converted to digital to work on a computer. Once the information is digital, computers can be used to edit the data and create effects that were never possible with analog media. Digital media is non-linear, which means it can be edited or played back starting at any point, which can be a huge timesaver compared to working with tape. Digital information also does not "wear out" after repeated use like tapes or records do, which results in much better longevity for digital media.
To summarize, a digital signal is an estimation of analog data. Digital recordings are made with ones and zeros, while analog recordings are made with linear bumps and dips. While digital information is not as exact as analog information, it can be used with other digital devices, such as computers, making editing and reproduction of the information easier and faster. Because digital media is more compatible and does not degrade over time, it has become the common choice for today's audio and video formats.
Is your Brain Analog or Digital ?
__________________________________________________________________________________VCRs, tape players, and record players, on the other hand, are analog devices. This is because they record data linearly from one point to another. Imagine a bumpy line moving from left to right -- that is what an analog audio recording would look like. Analog devices read the media, such as tapes or records, by scanning the physical data off the media.
For example, a record player reads the bumps and dips in the grooves of the record and translates the information into an audio signal. An audio CD player, however, reads ones and zeros off a compact disc and translates that information into an audio signal. However, the ones and zeros only estimate the actual soundwave, whereas a record player records the exact sound. When you hear terms like "sampling rate" or "bit rate," these refer to how many times per second the digital signal is sampled. The higher the number, the more accurate the estimate is, which translates into higher quality sound or video.
So why is digital technology used if analog provides a better representation of the recorded information? Well, since computers perform digital computations, they can only work with digital media. Therefore, all analog audio or video media must be converted to digital to work on a computer. Once the information is digital, computers can be used to edit the data and create effects that were never possible with analog media. Digital media is non-linear, which means it can be edited or played back starting at any point, which can be a huge timesaver compared to working with tape. Digital information also does not "wear out" after repeated use like tapes or records do, which results in much better longevity for digital media.
To summarize, a digital signal is an estimation of analog data. Digital recordings are made with ones and zeros, while analog recordings are made with linear bumps and dips. While digital information is not as exact as analog information, it can be used with other digital devices, such as computers, making editing and reproduction of the information easier and faster. Because digital media is more compatible and does not degrade over time, it has become the common choice for today's audio and video formats.
Is your Brain Analog or Digital ?
Compare an analog and a digital audio recording medium. VHS video tape - an analog medium - stores a continuous curve of modulated audio/visual information. In a digital CD continuous audio is sliced into 44,100 frames a second, and represented by discrete numbers.
On playback the sounds are presented as continuous, much as the individual still frames of a motion picture appear continuous when played back fast enough. Most people can't hear the difference between digital and analog recordings, me included, but those who say they do may spend thousands on turntables and tube amps to get the full analog experience.
From measurements, we know that neuron currents are continuous, not step functions. The important question is how is the information represented by these signals? Most psychological research assumes continuous or analog representation .
your brain
Does it matter how the brain represents information? It does.
Take probability estimation, for example, something we do every day. It is well known that humans are not very good at estimating probabilities, as we tend to overestimate small probabilities - a plane crash - and underestimate large probabilities - someone guessing our "12345" password - when making decisions.
If we assume that the brain represents subjective probabilities in a continuous (analog) form, we should be able, for example, to discriminate between a probability of 0.36 and 0.48. Instead, research has found that humans consistently round off decimals using a process that is best approximated by 4 bits of precision .
Information theory
It may also be that the brain itself represents different data with different bit depths. We encode high quality color photos with 24 bits, or almost 17 million colors, while we encode music - except for audiophiles - in 16 bits, or 65,536 levels.But human experiments are not the only reason to believe the brain is a digital device. Information theory also supports the hypothesis.
Analog signals are sensitive to noise, and the brain is a noisy place, with sensory, cellular, and motor noise, among others. Just as a vinyl record or magnetic tape degrades over time, making it impossible to fully recover the original signal, analog signals in the brain would similarly degrade in their journey from, say, the retina to the visual cortex. But we see, ideally, in beautiful color and amazing acuity, despite the long journey of the data.
The Storage Bits take
Accepting that the brain is a digital device will help neuroscientists and psychologists better understand how we think. For example, perhaps some perceptual issues, such as synesthesia - where people "see" sounds or "smell" colors - may be due in part to digital decoding mechanisms sending their results to the wrong sensory inputs. Also, people may differ in how many bits of representation they are capable of, and different cultures may suppress or enhance some representations over others.Another, more chilling possibility is that, as we gather more and more data on each individual's online activities, today's psychographic profiles may become much more attuned to our individual neuroprocessing abilities and limitations. What if we could tailor information levels to overload certain populations so they tune out, or are unreasonably stimulated?
This already happens today. But if machine-tailored to each individual, the results could be much more nuanced and controlled. And it wouldn't stop with urging you to try a new mouthwash .
Analog-Digital Divide as AI’s Greatest Challenge
_________________________________________________________________________________
The digital revolution heralded the virtual end of analog computers. The use of analog systems has since been confined to highly specialist areas like inertial guidance systems. But analog is making a come-back. Digital processors have become smaller and hotter and the limits to ever faster speed and performance are coming in sight. Moreover, digital computers have limits when it comes to processing wave-like analog continuous phenomenon we find in biology — and most crucially in the brain. Scientists are now trying to find ways to combine analog and digital in hybrid chips and other technologies.
Over the past 40 years, digitization has become the norm. Nearly all media, the Internet and nearly all industrial processes today are digital, courtesy of high-powered processors and sophisticated algorithms. The process is of digitizing is as easy as it is ingenious. A textbook example is “digital music.” The sound wave is sampled more than 40,000 times a second. Each sample is given a binary number and the numbers are written to a storage device. An audio system reads the binary strings and converts the string back into an analog sound wave. A sampling rate of 40,000 times a second is high, largely obscuring the missing information in the analog-digital conversion, but it still is discrete rather than continuous.

In biology and other more sophisticated processes, this missing information can be decisive. The human brain, perhaps the most complex of all living organisms, is still not fully understood. The brain works with voltages, which are analog, while firing neurons which operate on the binary principle of on and off, firing and non-firing. The noted mathematician Freeman Dyson, in his 2014 lecture ‘Are Brains Analogue or Digital’, explained the complexities of understanding brain functions like memory. “It seems likely that memories are recorded in variations of the strengths of synapses connecting the billions of neurons in the brain with one another. But we do not know how the strengths of synapses are varied. It could well turn out that the processing of information in our brains is partly digital and partly analog. If we are partly analog, the downloading of a human consciousness into a digital computer may involve a certain loss of our finer feelings and qualities.”
Professor Dyson points at a third possibility: The processing of information in our brains is done with quantum processes, and the brain is the biological equivalent of a quantum computer. He adds this is speculation: “Quantum computers are possible in theory and are theoretically more powerful than digital computers. But we don’t yet know how to build a quantum computer, and we have no evidence that anything resembling a quantum computer exists in our brains. Whether a universal quantum computer can efficiently simulate a physical system is an unresolved problem in physics.”
Converging analog and digital
The intricacies of the brain exist on the cellular and quantum level and are governed by electrical voltage variations. We can safely assume that variations in one part of the brain instantaneously impact other parts of the brain, as well as the rest of the body. Digitizing such quantum-level variations, no matter how high the sampling rate, results in loss of information. Moreover, converting digitized data to analog output requires massively complex equations performed in real time, a special challenge in simulating biological processes. Analog computing directly solves ordinary differential equations that are at the heart of continuous (wave-like) processes.
Scientists are attacking the problem in various ways. Yipeng Huang, a computer architecture engineer at Columbia University, developed a chip architecture conceived as a digital host with an analog accelerator. He points out that computations that are more efficiently done through analog computing get handed off by the host to the analog accelerator. In other words, the chip interleaves analog and digital processing within a single problem, applying each method according to what it does best. The high performance of the analog computing speeds the computation by skipping initial iterations and the incremental digital approach zeroes in on the most accurate answer.
In 2016, researchers at MIT’s Computer Science and Artificial Intelligence Laboratory and Dartmouth College presented a paper on a new analog compiler that could help to enable simulation of whole organs and even organisms. The compiler takes as input differential equations and translates them into voltages and current flows across an analog chip. The researcher used an analog chip design from electronics engineer Rahul Sarpeshkar to test their compiler on five sets of differential equations commonly used in biological research. Sarpeshkar said in an MIT news release. “With a few transistors, cytomorphic (cell-resembling) analog circuits can solve complicated differential equations — including the effects of noise — that would take millions of digital transistors and millions of digital clock cycles,”
Current attempts to integrate analog and digital processes are primarily aimed at improving and speeding up complex equations required for analog processes. The issue does not seem to concern AI experts and the Singularity community who believe science will develop non-biological intelligence that will match the range and subtlety of human intelligence in a few decades. They point at the exponential growth in the power of computers and believe reverse-engineering of the human brain is possible with sufficient computing power. Only time will tell whether infinite binary computing speed can sufficiently compensate for the “missing information” of analog processes in creating artificial human-like intelligence.
Purpose
The debate on the analog-digital divide has a surprisingly long history, not only in technical differences but also on the intuitive and theoretical level. It has been addressed by Immanuel Kant, Soren Kierkegaard, Ludwig Wittgenstein and Gregory Bateson. Carol Wilder, professor of Media Studies at The New School in New York, discussed the aesthetic dimension of the analog-digital issue in her paper ‘Being Analog’. She wrote: “It has become apparent that analog/digital carry both precise meanings at the level of physiological, chemical, and electrical processes and broadly metaphorical meanings when applied to human communication and behavior.” Wilders conducted an informal survey asking students what they identified with analog and digital phenomena. The answers ranged from the whimsical to the profound but reflect popular thought about the issue — see sources below.

The analog-digital debate serves to remind us that predictions about the birth of the first humanoid are premature. Assuming it is desirable, relying only on computing may not be the best strategy. AI could do well to adopt the method used by Norbert Wiener when he developed Cybernetics: an interdisciplinary approach. It could include experts from the field of physics, biology, macrophysics as well as from the humanities: psychology, philosophy, epistemology and specialists in meditation and other spiritual practices. A meeting of such minds could not only help to separate fact from fiction, but also give direction and purpose.
on control DC Motoric ; a sample of power supply management _________________________________________________________________________________
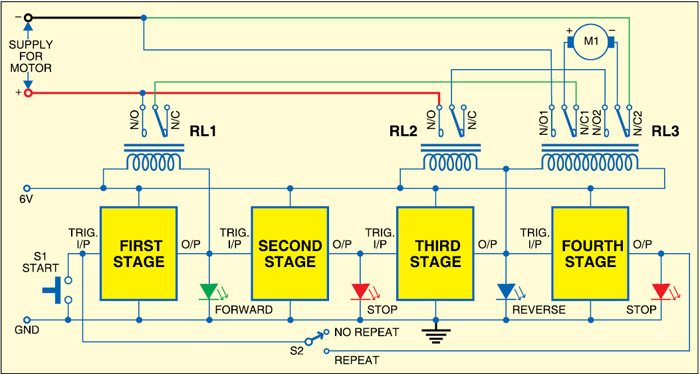
Block diagram of the sequential timer for DC motor control
Sequential Timer for DC Motor Control
_____________________________________________________________________________
Sequential timer is a widely used circuit in industrial plants because most industrial processes are chain reaction type.
Most industrial processes require rotation of the motors in forward and reverse directions for desired periods. One good example is the automated bottle filling plant. Here the bottles move on a conveyor belt. When the bottles come under the filler, the filler comes down (the motor attached with the mechanism rotates forward) and fills the bottle (the motor stops), then it goes up (the motor rotates in reverse direction) and stops until the next bottle arrives. For moving the filler up and down, the time of rotating the motor forward and reverse is calibrated and fixed. Also, the stop time of the motor is calibrated based on the time required to fill the bottle and the time before arrival of the next bottle.
A good domestic application is in washing machines. Once the timer is set to wash clothes, the motor automatically rotates forward and then backward for fixed periods (10 to 15 seconds) with small pauses in between.
Fig . 1
is a sequential process, a sequential timer can be used to implement it. Sequential timer is a widely used circuit in industrial plants because most industrial processes are chain reaction type. That means as one process ends, it triggers the next. The ending of the last process triggers the first process. Thus the cycle continues.
Generally, such sequence timers are microcontroller-based, multifunctional and programmable. But a very simple sequential timer can be developed using NE555 ICs wired in monostable mode. Cascading a number of these monostable stages forms a sequential timer. The output of one stage is applied as the trigger to the next stage. So when the output of a stage drops, it triggers the next stage and the output of the next stage goes high, and likewise the chain reaction starts. Because here the process involves four steps (forward→stop→reverse→stop), four stages of NE555 ICs connected in monostable multivibrator mode are used to form a four-stage sequential timer. The first stage rotates the motor forward. The second stage stops the motor. The third stage rotates the motor in reverse. The fourth stage stops the motor.
these stages actually energise or de-energise the relays that connect the motor to the supply. 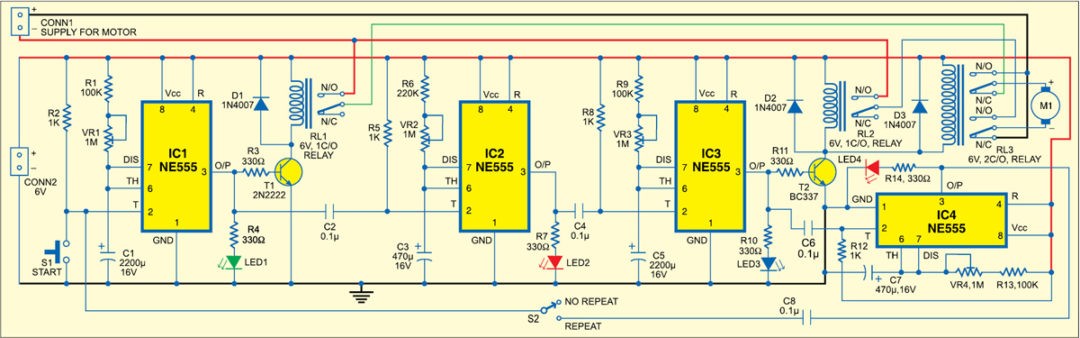
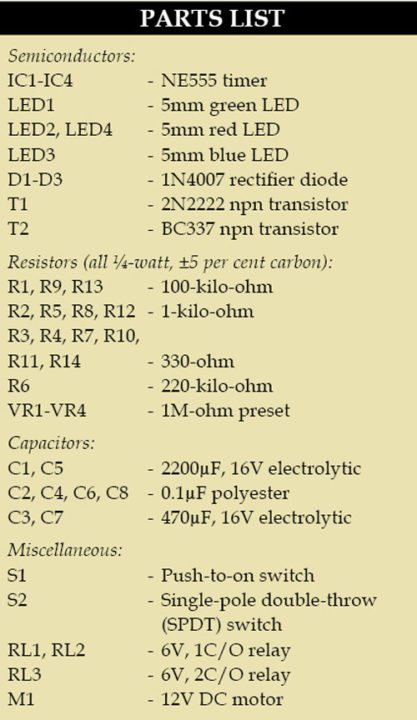
shows the block diagram of the sequential timer for DC motor control. The system consists of four blocks of NE555 timer ICs connected in monostable mode. The output of each stage is connected to the trigger input of the next stage. The output of the first stage drives single-changeover relay RL1 and the output of the third stage drives relays RL2 (single-changeover) and RL3 (double-changeover) simultaneously. The second and fourth stages provide delay in between the first stage and third stage outputs.
The LEDs connected at the four stages indicate the status of the motor:
1. In the first stage, the green LED indicates that the motor is running forward.
2. In the second stage, the red LED indicates that the motor has stopped.
3. In the third stage, the blue LED indicates that the motor is running in reverse direction.
4. In the fourth stage, the red LED indicates that the motor has stopped.
1. In the first stage, the green LED indicates that the motor is running forward.
2. In the second stage, the red LED indicates that the motor has stopped.
3. In the third stage, the blue LED indicates that the motor is running in reverse direction.
4. In the fourth stage, the red LED indicates that the motor has stopped.
The trigger input to the first stage is actually given through process start switch. The output of the fourth stage is fed back to the trigger input of the first stage through the SPDT switch. It decides whether the process continues in loop or one-time only.
relay connections to the motor are made such that these provide reversible supply to the motor to rotate it forward and backward. As mentioned before, there are two single-changeover relays (RL1 and RL2) and one double-changeover relay (RL3). Connections of relays to the motor are shown in Fig. 1.
Circuit description
Fig. 2 shows the circuit of the sequential timer. The first stage of the sequential timer is built around NE555 IC (IC1). IC1 is wired in monostable mode and its time period is determined by resistor R1, preset VR1 and capacitor C1. Preset VR1 is used to set the time from 4 to 45 minutes. This means you can rotate the motor from a minimum of 4 minutes to the maximum of 45 minutes. Maximum and minimum time limits can be changed by changing the values of the timing components as per the requirement.
Fig. 2 shows the circuit of the sequential timer. The first stage of the sequential timer is built around NE555 IC (IC1). IC1 is wired in monostable mode and its time period is determined by resistor R1, preset VR1 and capacitor C1. Preset VR1 is used to set the time from 4 to 45 minutes. This means you can rotate the motor from a minimum of 4 minutes to the maximum of 45 minutes. Maximum and minimum time limits can be changed by changing the values of the timing components as per the requirement.
Trigger pin (pin 2) of IC1 is pulled high with resistor R2. When switch S1 is pressed, it goes low and output pin 3 becomes high. The output of IC1 drives transistor T1 into saturation and relay RL1 energises. Also, LED1 (green LED) connected with output pin 3 glows to indicate that the motor is running, say, in forward direction.
The output of IC1 is fed to the second stage through coupling capacitor C2. IC2 (NE555) triggers when the output of IC1 goes low. Diode D1 acts as a free-wheeling diode. The second stage of the sequential timer is made around IC2. This stage provides delay between the first stage and third stage. The red LED connected at the output of IC2 indicates that the motor is in stopped condition.
IC2 too is configured in monostable mode. Its time period is determined by resistor R6, preset VR2 and capacitor C3. Preset VR2 is used to set the time from 1.75 to 10 minutes. If the process requires different timing, the values of timing components can be changed accordingly. The output of IC2 is coupled to the third stage through coupling capacitor C4. IC3 triggers when the output of IC2 goes low.
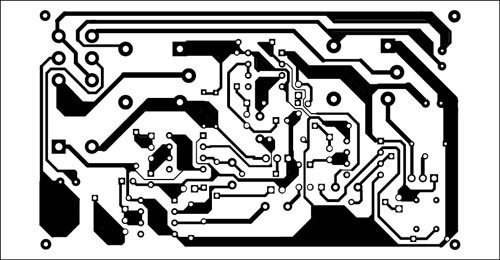
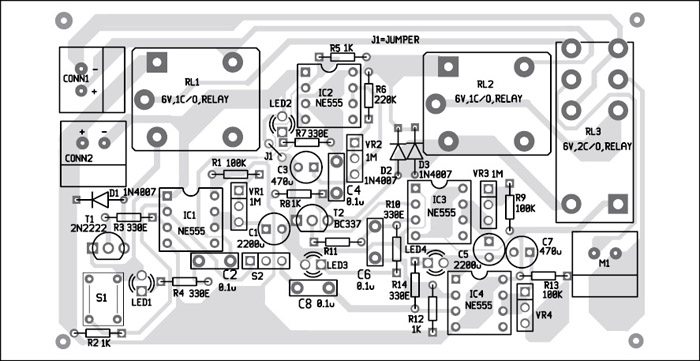
The third stage of the sequential timer is built around IC3. The timing component values of the third stage are the same as for the first stage because forward rotation time and reverse rotation time should be the same. The only difference is that this stage drives relays RL2 and RL3 simultaneously. Both the relays are connected in parallel and driven by transistor T2. LED3 (blue LED) connected at the output indicates change in the direction of rotation of the motor.
The output of IC3 is coupled to the fourth stage through coupling capacitor C6. The fourth stage of the sequential timer is built around IC4. This stage is identical to the second stage as it also provides delay if the process has to be repeated continuously. If the process completes in a single cycle, this stage is not required. IC4 triggers when the output of IC3 goes low.
Thus with the help of these four timer blocks, the motor first rotates forward (clockwise) for 4-45 minutes, stops for 1.75-10 minutes, rotates in reverse (anticlockwise) direction for 4-45 minutes and then stops for 1.75-10 minutes. The process repeats.
actual-size, single-side PCB for the sequential timer for DC motor control is shown in Fig. 3 and its component layout in Fig. 4. Assemble the circuit on a PCB as it minimises time and assembly errors. Carefully assemble the components and double-check for any overlooked error. Use proper IC base for the ICs. Before inserting the ICs, check all the supply voltages.
Connect the 6V power supply to CONN2 and supply for motor to CONN1. Motor M1 should be connected through a connector. Switch S2 should be connected to the PCB through wires.
Now the circuit is ready to use. Press switch S1 to start the motor. Put switch S2 in repeat mode for continuous operation.
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
3 Simple ways to build an adjustable timer circuit diagram (1 to 10 minute timer, cyclic on-off timer and Arduino timer to adjust long intervals of time).


+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
Tidak ada komentar:
Posting Komentar